

2023/4~現代
ここでは動く板の秘蔵資料(主にハードウェア関連)を掲載しています。
画像を大量に含むので従量制ネットワークの方は要注意!
目次
古代動く板(AD2023前期)
動く板概念(iCCD第一回課題)
奇妙な事に、これ以降の課題提出の形跡を見つけることができなかった。
iCCDというバックを得た動く板プロジェクトは「活動場所と予算」を得て実装段階に入る…
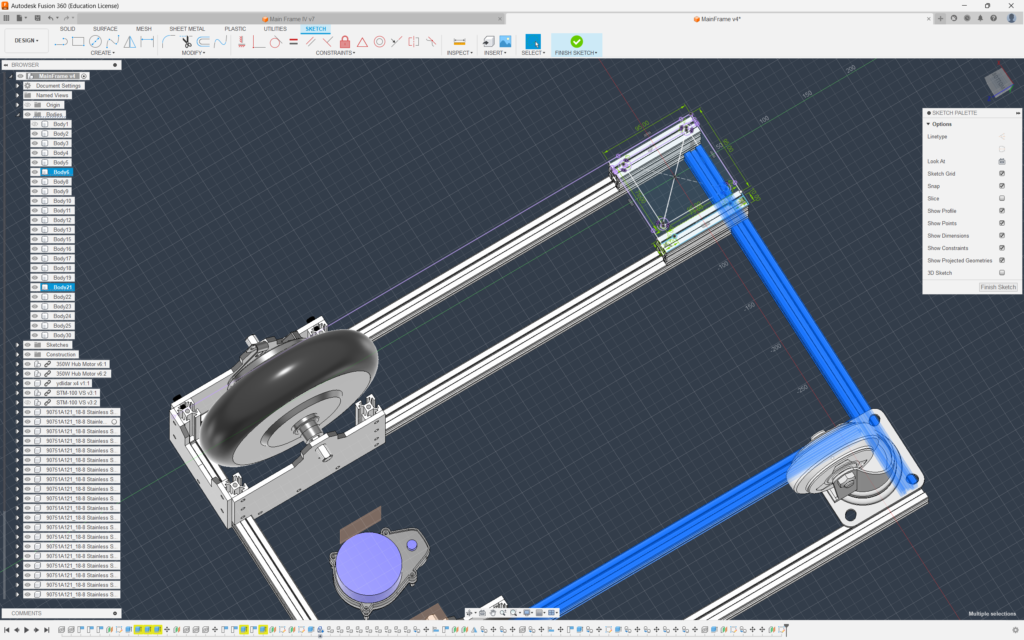

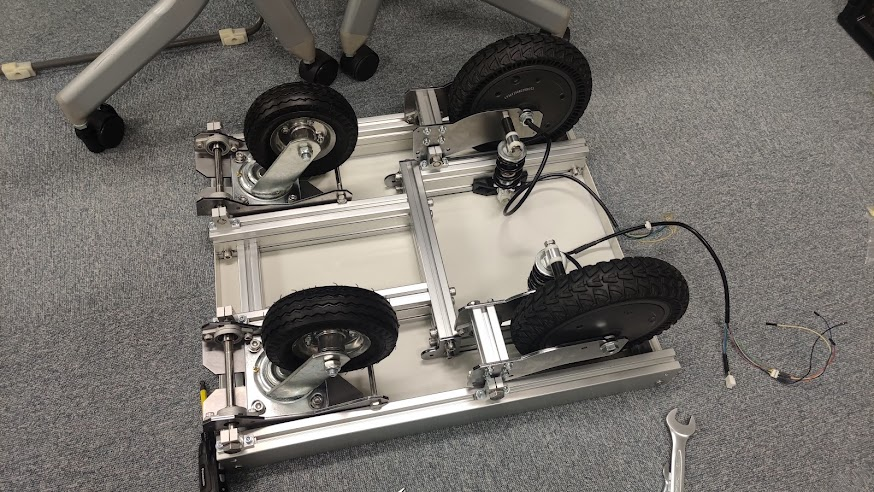
同日。モーターとバッテリーを適当に組み込んだ状態。


Aliexpressで買った電動バイク用のモタドラを左右輪それぞれに使用しているため、操舵には2つのコントローラーを同時に操作する必要がある玄人仕様。
このモタドラはシリアル等で制御できないので、同時並行で専用のモタドラ開発を進めた。

怠惰に過ごしていたら、あっという間にUPoC中間発表前日(公費払いできる長納期な入手先に限定して部品を調達したのも良くなかった)

ファームウェアの実装が間に合わず、UPoC当日に動かす事は出来なかった…。
しれっと後輪側面の板が5.5mm厚ステンレス製に置き換わっている。
中世動く板(AD2023後期)
ブラシレスモータードライバが上手く動かず、苦渋のギアモーター駆動化。
インホイールモーターは単に車輪として使用…。
この世代の動く板は前輪駆動。


外部からギアモーターで無理やり駆動している動く板
後期の授業に追われて気がつけばUPoC最終発表。

この世代の動く板に語る事はあまりない。
近世動く板(AD2024前期)
UPoCと調布祭が過ぎ去った今、モタドラを再設計する時間的余裕が生まれた。
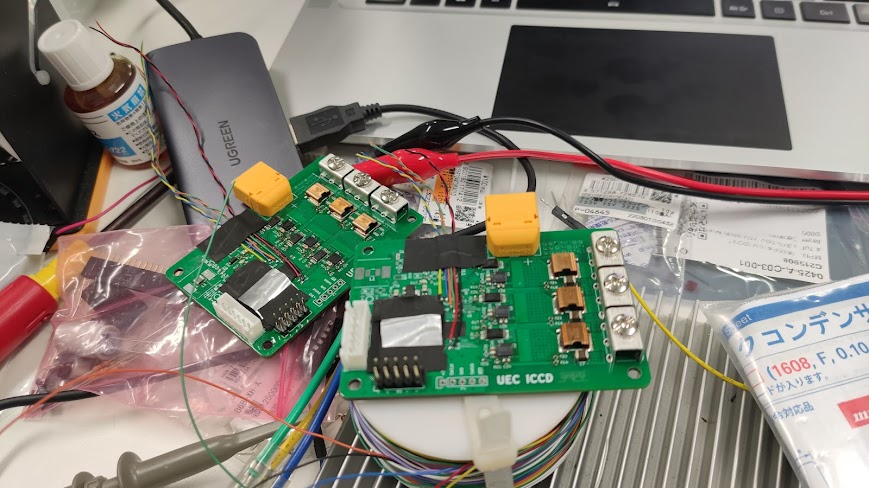
SimpleFOCという便利なライブラリの存在を知り、ラズピコで作った簡易なSimpleFOC向けモタドラでブラシレスモーター制御を学びなおすことに。
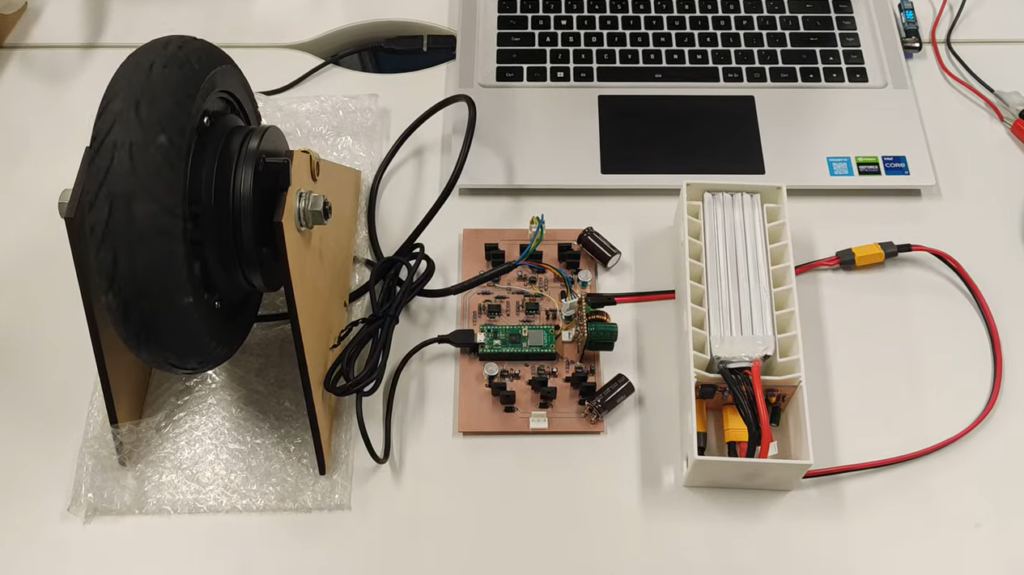
ブラシレスモーターがついに(まともに)動いた!
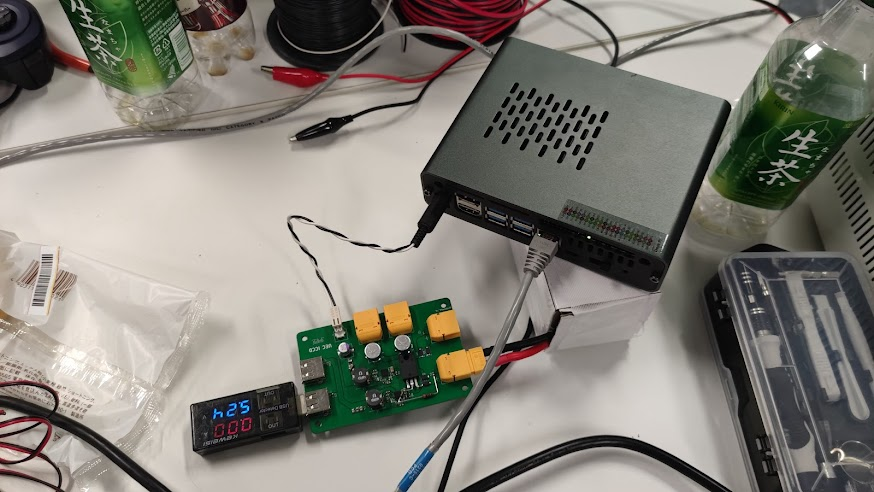
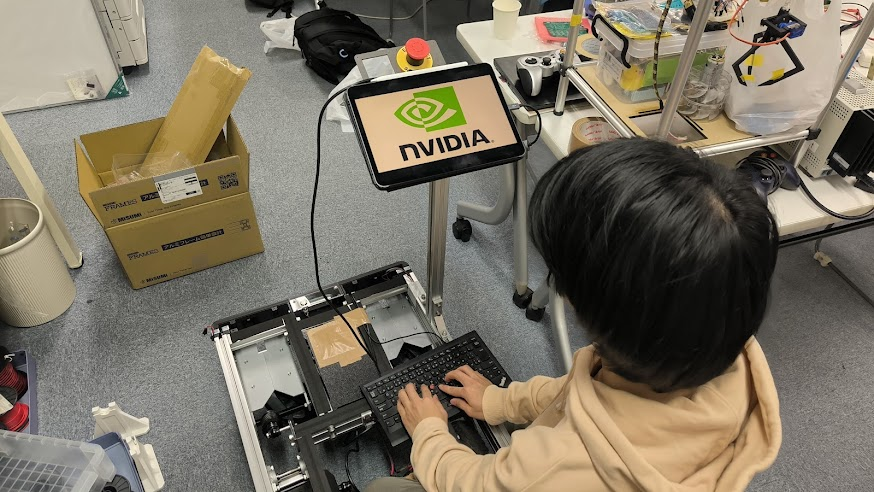
試験モタドラを板に搭載。
Jetson NanoとモタドラをUSB接続して動作確認。
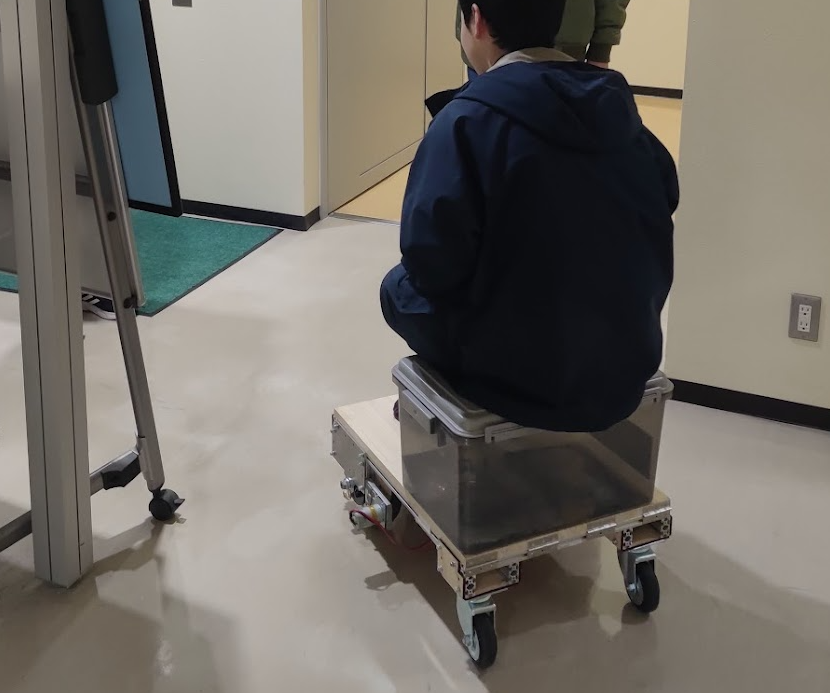
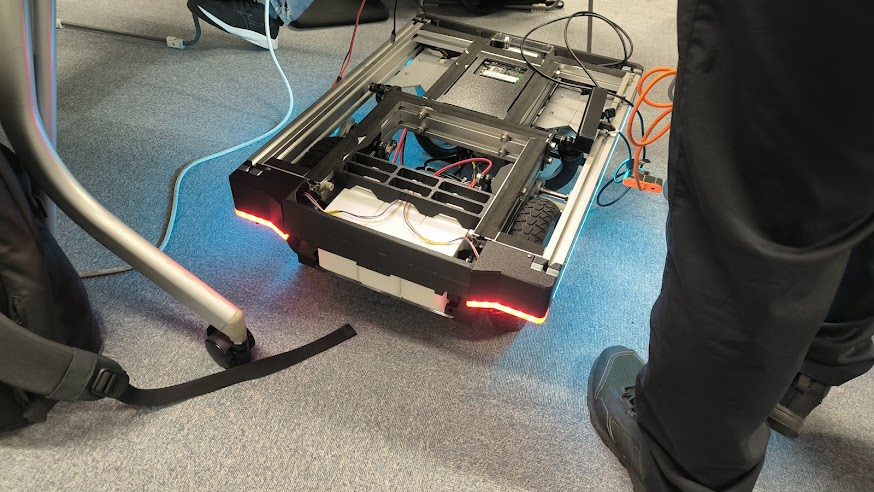
軽く試走した所、前輪駆動では減速時に安定性が低い問題が判明し、後輪駆動に変更した(前輪駆動だと台車に乗って遊んだ時のようにクルンと回転してしまう)

そこそこの速度で走るため、非常停止スイッチ(電源兼用)を追加。

2023/4/30 諸事情により、搭載バッテリーをLi-Poから鉛蓄 or LiFePO4への変更を決意。
ここで少し活動が自粛気味になる。

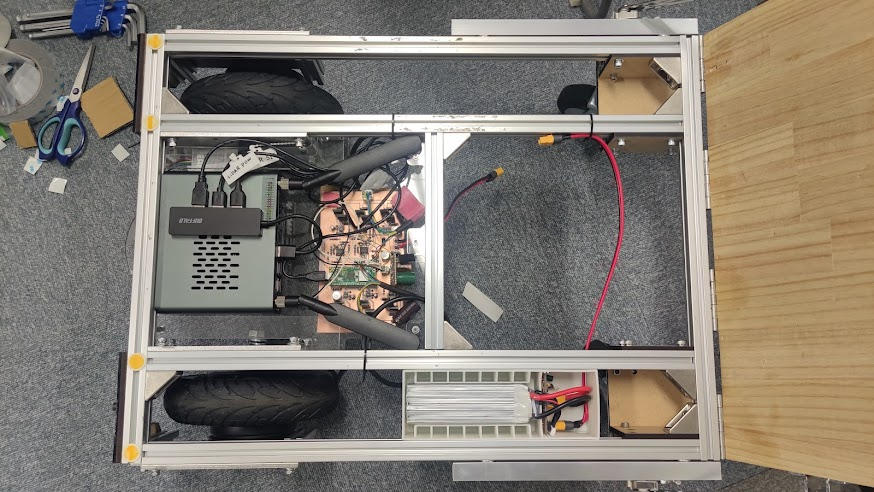
近代動く板(AD2024中期)
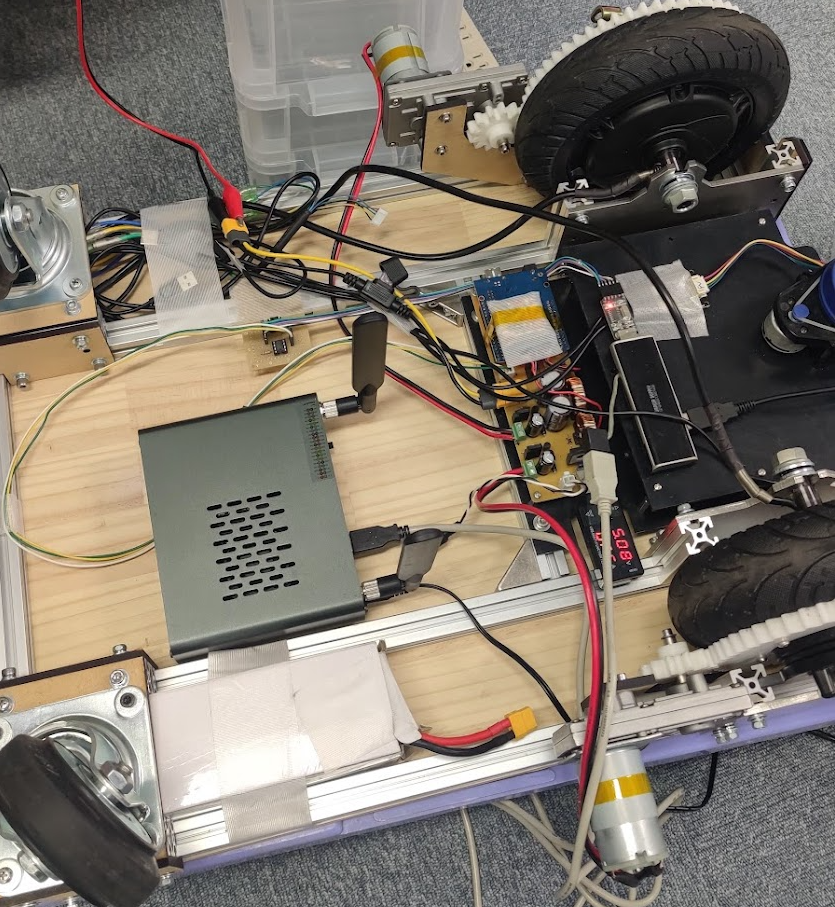
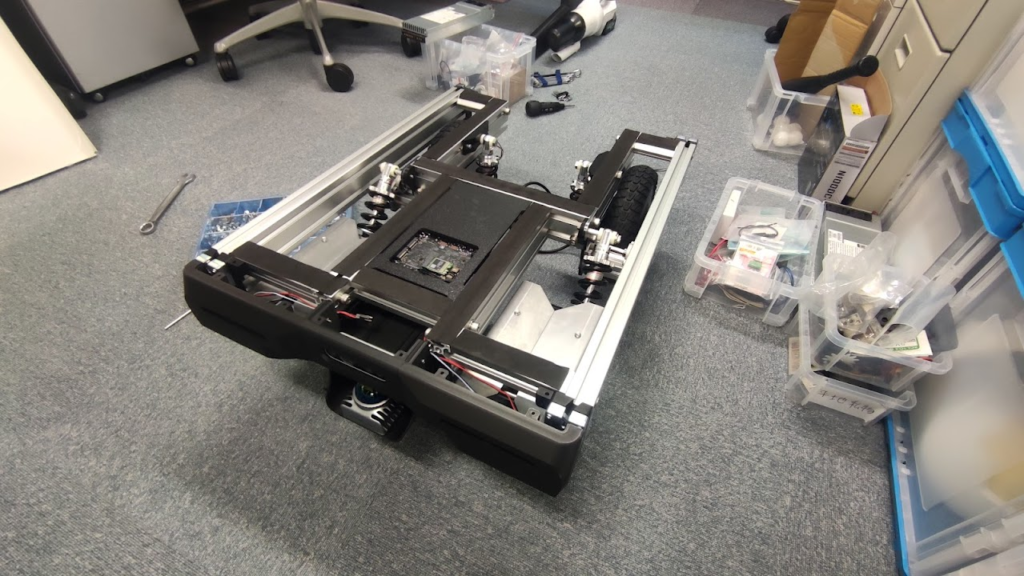
Jetson Nanoの処理能力不足、2D LiDARの限界からハード構成を刷新。
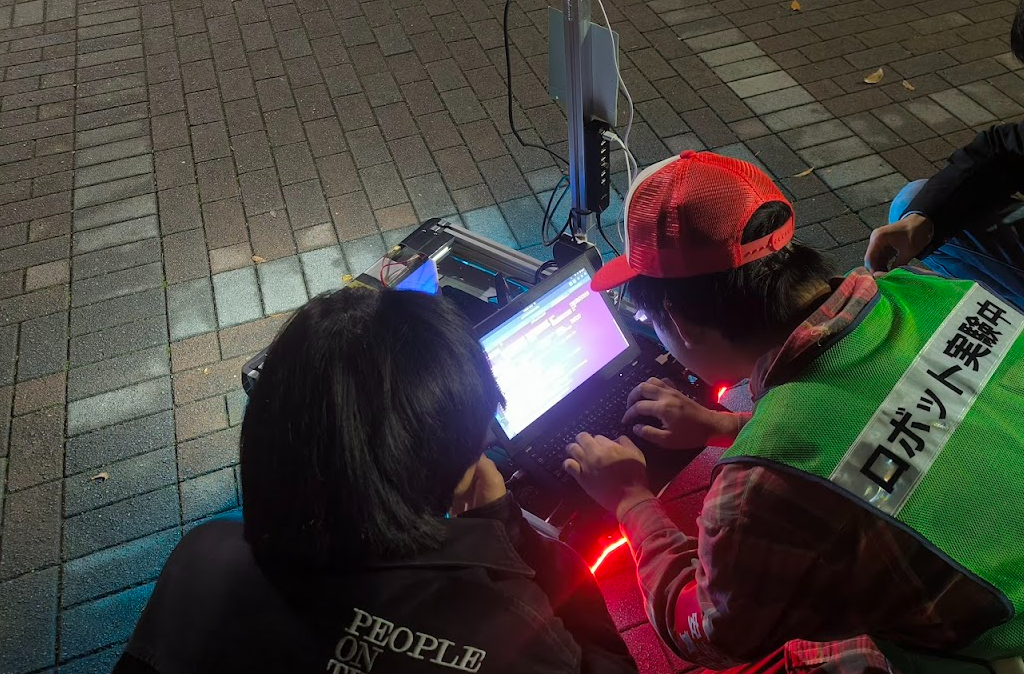
JetsonをASRock製N100DC-ITX マザーボードに置き換え、前方にLivox Mid-70を搭載。
いよいよ自動運転を現実的に考え始めた時代。
UPoCに向けて、新規性を持たせるためにサイネージ化したりするなど迷走がみられた。


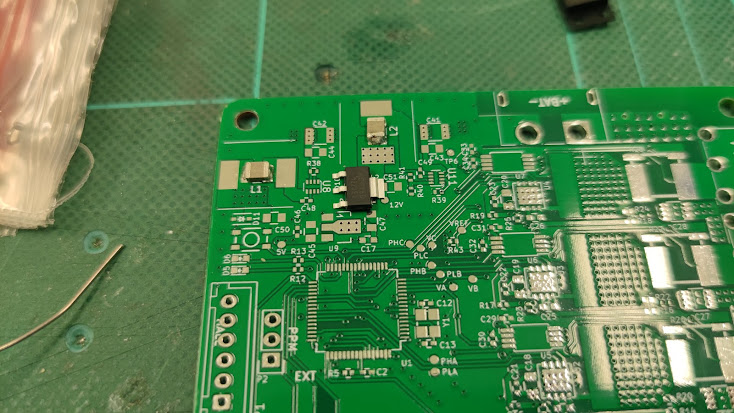
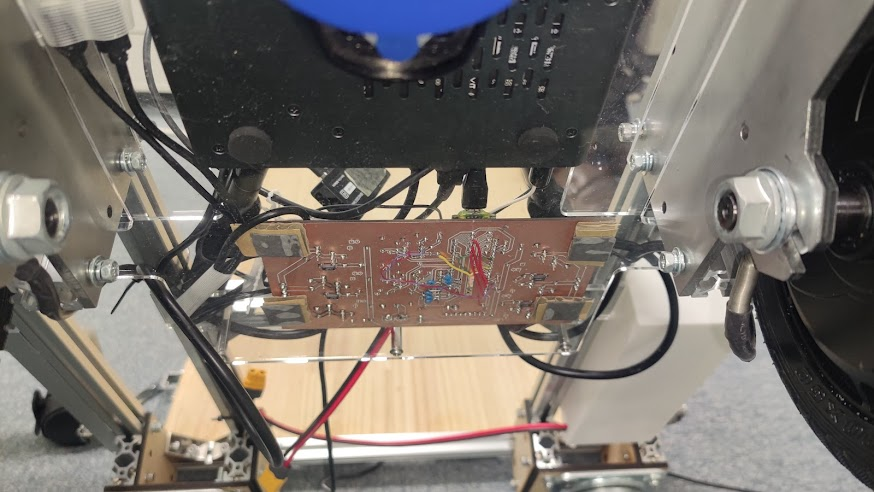
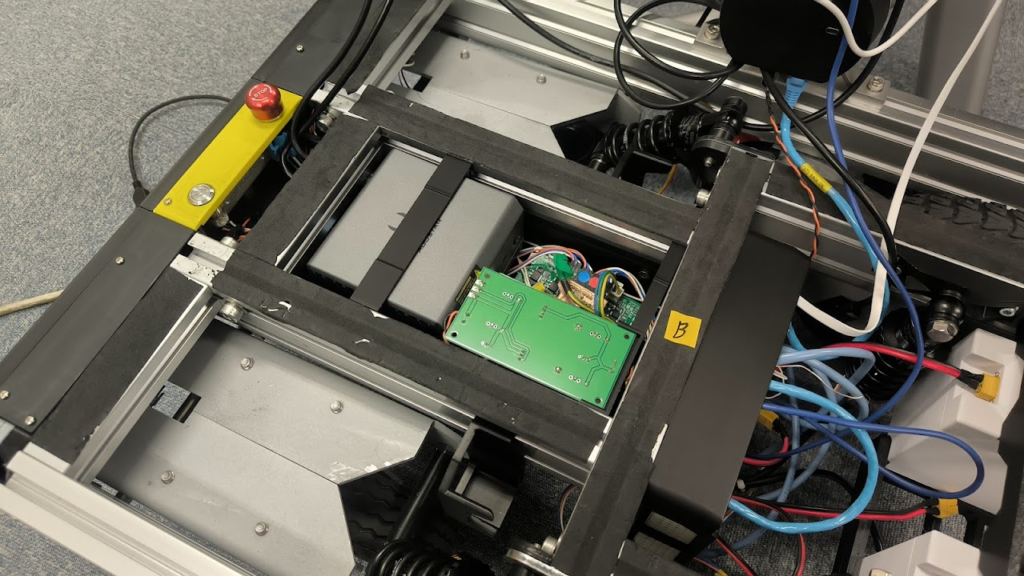
同日。ひっそりと新モタドラ基板が完成していた。
現代動く板(AD2024後期)
ここまでの開発で、走行時の「振動」の問題が無視できなくなって来ていた。
電通大のおわってる舗装状態に起因する強烈な振動はLiDARの点群を狂わせ、車体のあらゆるネジを緩めた。
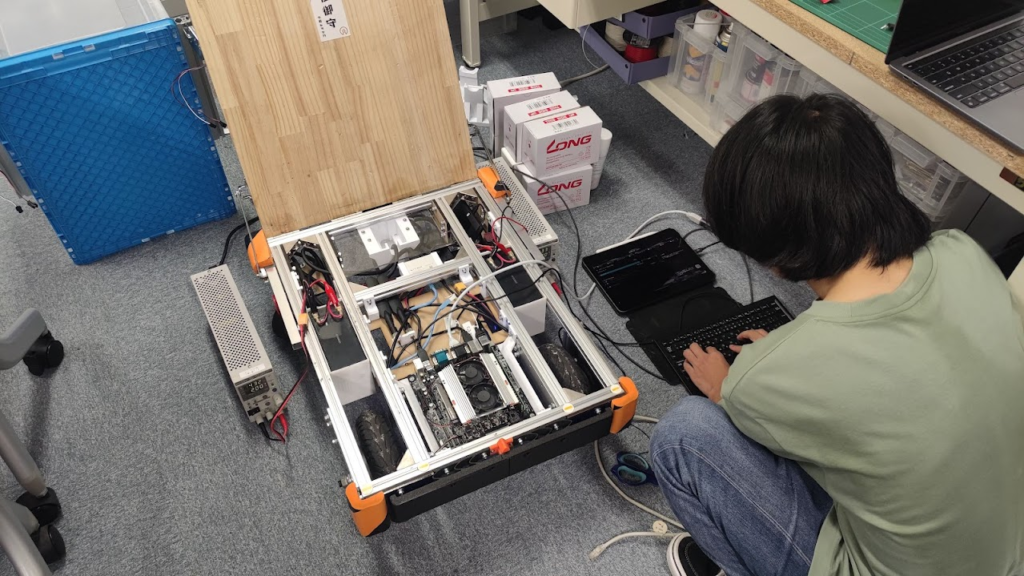
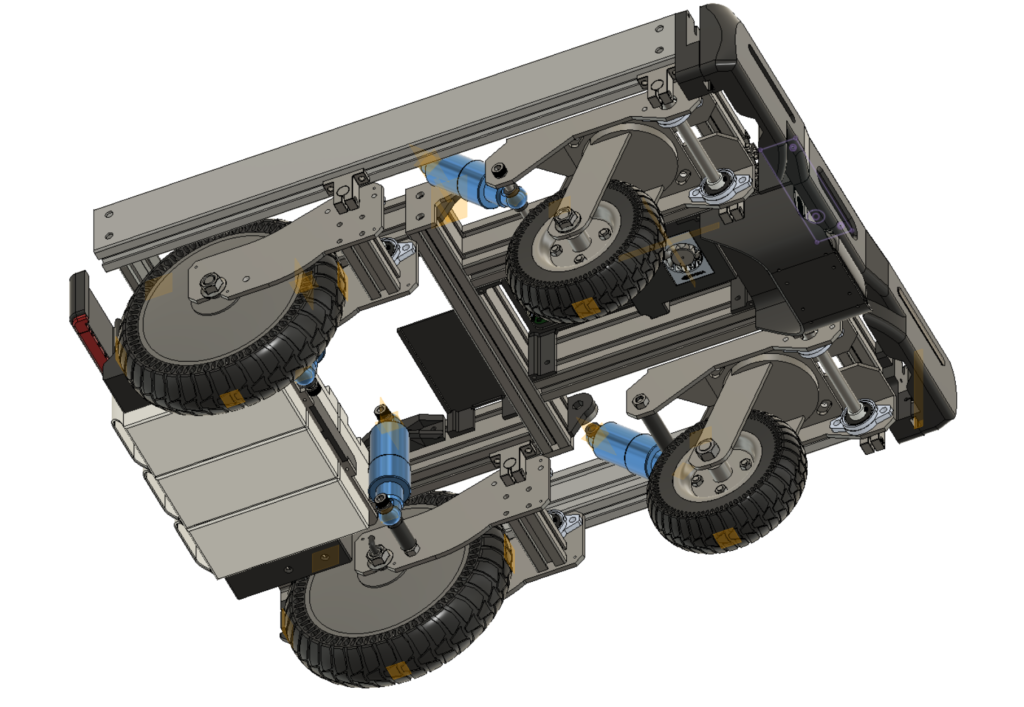
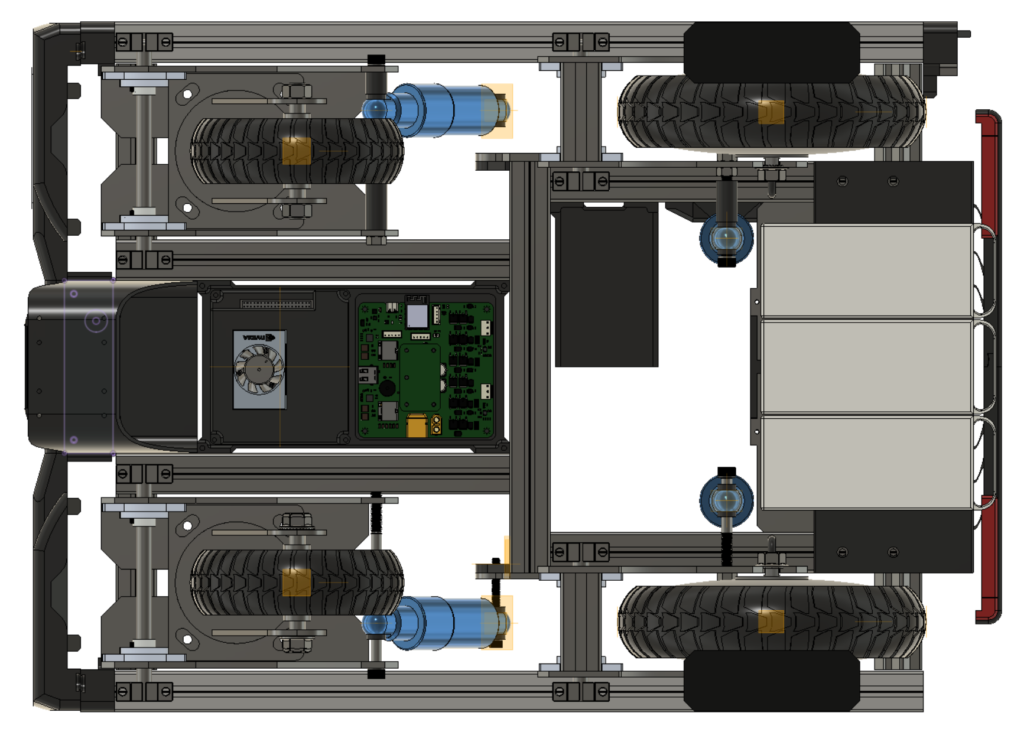
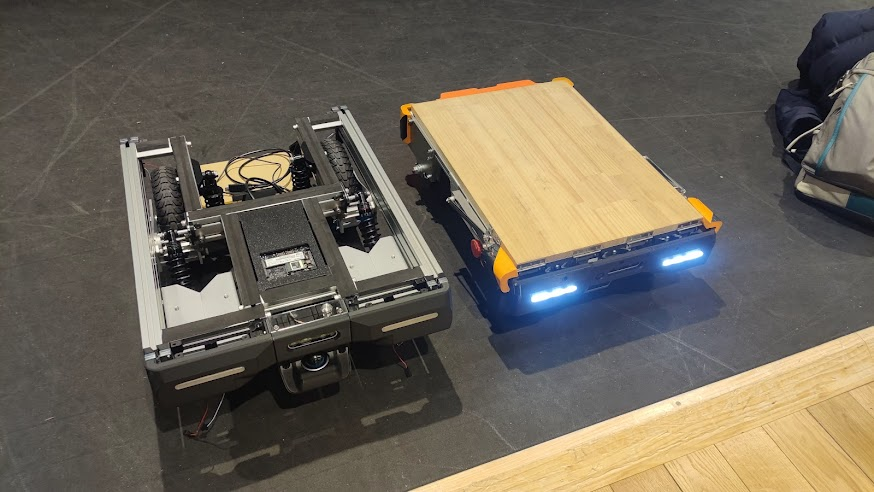
UPoCの賞金を使って、今こそ新機体「動く板NEO」を作る時が来た!
~「動く板NEO」の要件~
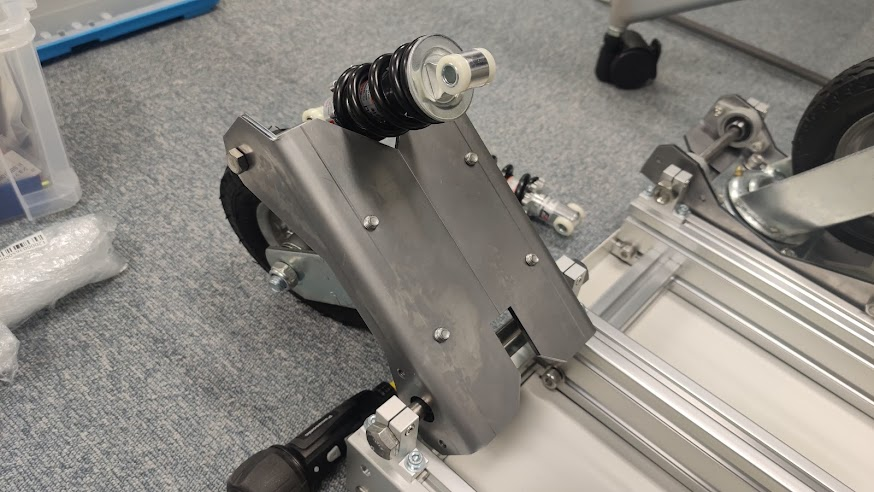
・4輪独立懸架式サスペンション(車体の振動を軽減)
・着脱式バッテリー(つくチャレでの長時間駆動を意識)
・高剛性(耐荷重向上とねじ緩み防止)
・Jetson Nanoを超える処理性能

ミスミ学生モノづくり支援制度を利用してMeviyによる板金部品を特注。


交換用モーターを選定した。




サンハヤト賞を頂きました。
https://elchika.com/article/a0d72afb-e012-4ed5-8440-e449d16a5178


重い腰を上げてようやくNEO用のモタドラのアートワーク設計に取り掛かる。
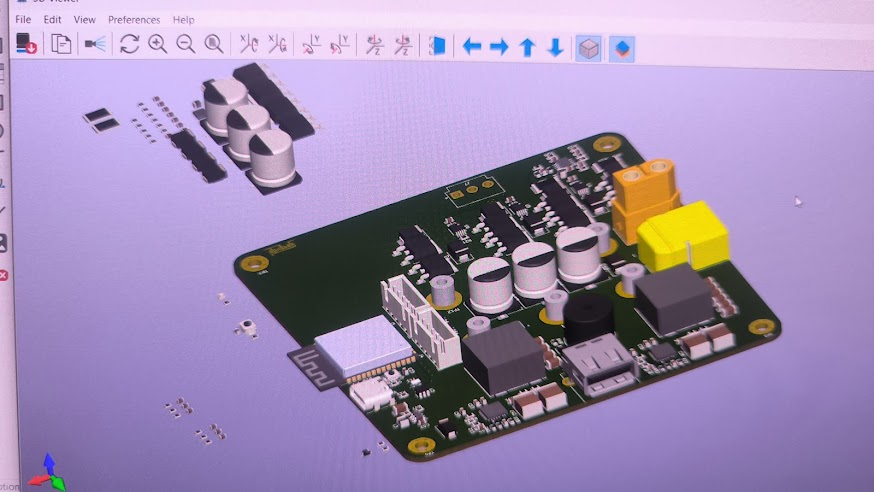
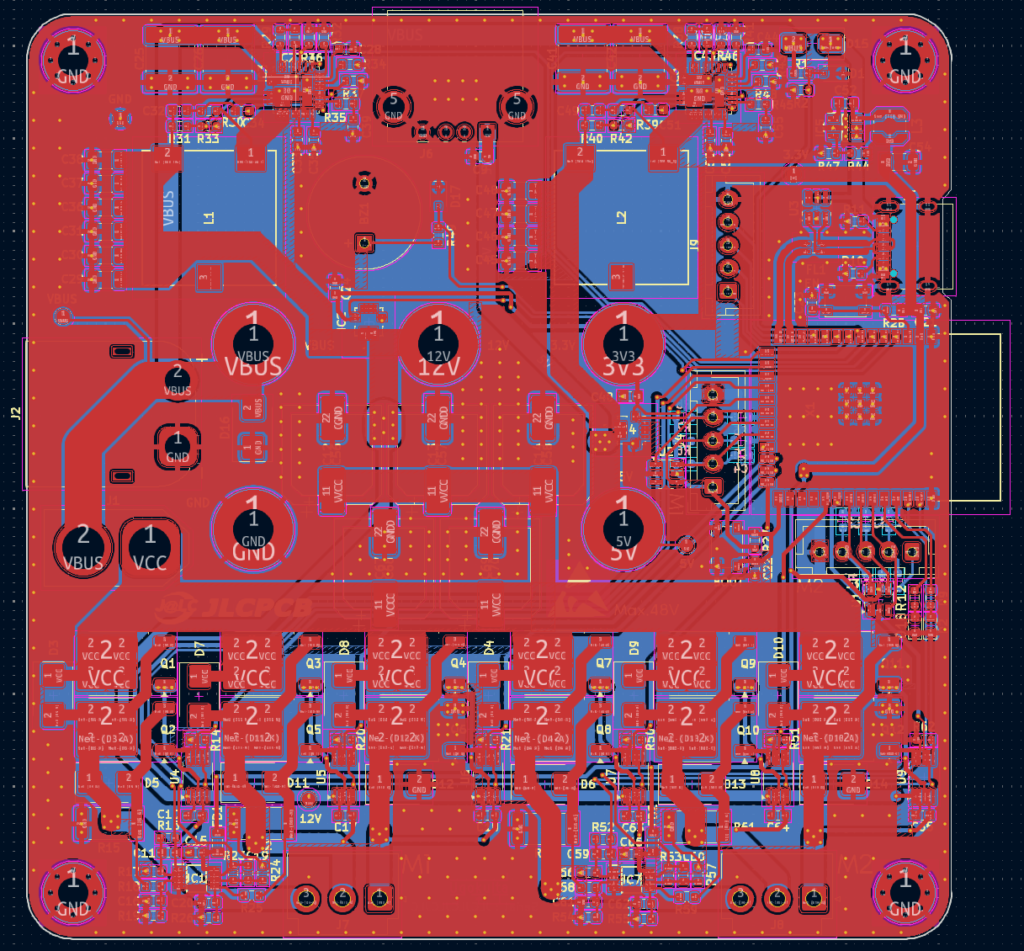
この基板はスポンサーのJLCPCBにPCBA付きで無償製造して頂いた(ありがたい)
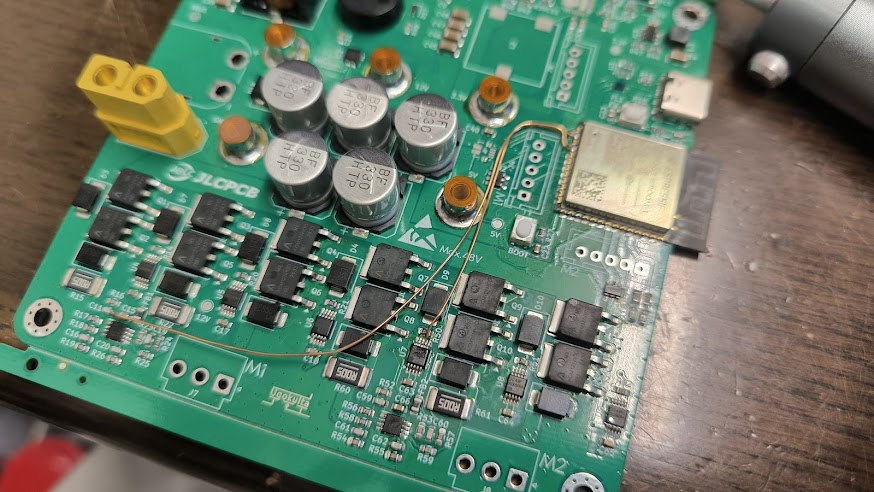
動作は問題なかったので一安心。


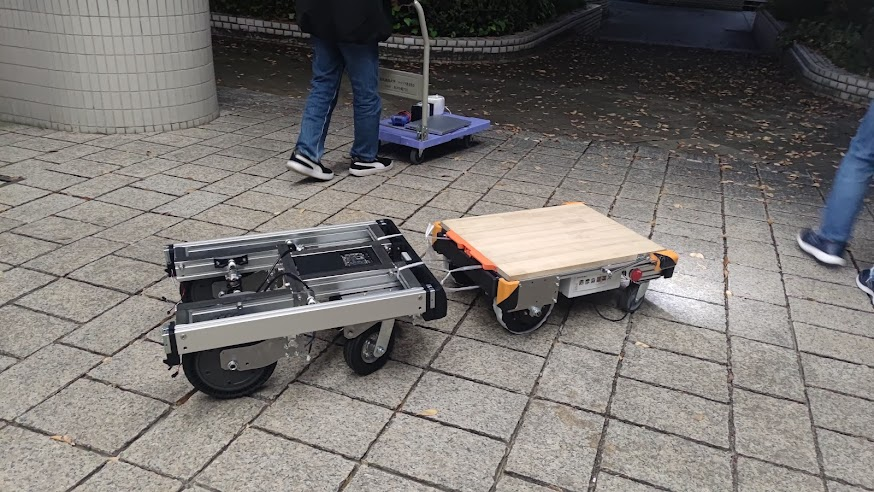
ここからUPoCや他のコンテストの事は忘れて、つくチャレに向けた開発一色。
つくチャレのレギュレーション(高さ60cm以上)を満たすために棒を固定。


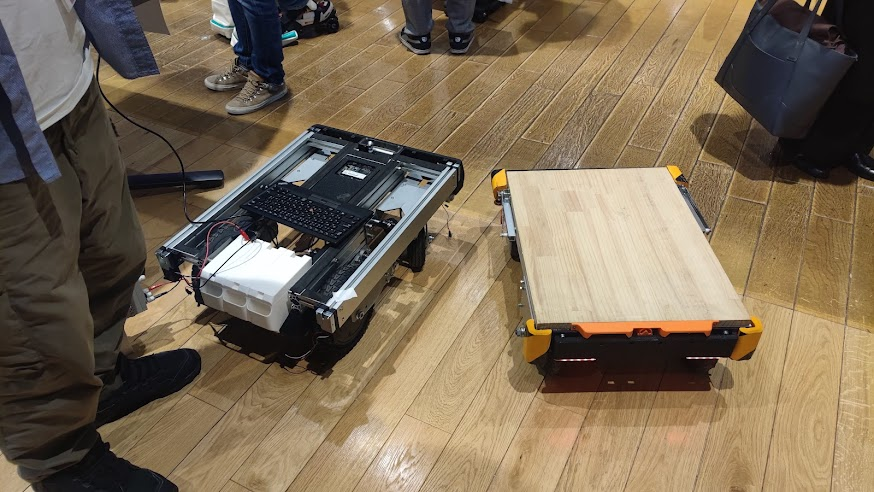
ここにきてJetson Orin NanoのCPU性能よわよわ問題が露呈。
急遽RyzenのつよつよCPU、AI 9 HX370を搭載したミニPCに載せ替え。
デバッグ作業の効率化のためUSB PD給電に改造したEIZO製モニターを搭載。





気になる結果は、

動く板、次は2026年編に突入))
Вы можете заказать алкоголь на дом через наш сайт, где работает доставка алкоголя круглосуточная в Москве. [url=https://dostavkaalkogolyaboka.msk.ru/]алкоголь на дом[/url]
Для клиентов важно, чтобы их заказы доставлялись как можно скорее. Клиенты ожидают получения алкоголя в кратчайшие сроки, чтобы не терять время на ожидание. Клиенты часто злятся, когда их заказы задерживаются
Различные компании используют разные методы доставки алкоголя, что позволяет им адаптироваться под конкретные потребности клиентов. В некоторых случаях целесообразно использовать автомобили с холодильными камерами. Правильный выбор метода доставки позволяет компании повысить удовлетворенность клиентов и увеличить прибыли.
Поставщики алкоголя играют решающую роль в доставке алкоголя. Поставщики алкоголя должны обеспечивать качество напитков Качество напитков оказывает прямое влияние на репутацию компании, поэтому важно выбирать надежных поставщиков.
Поставщики алкоголя должны соответствовать стандартам качества и безопасности. Поддержание стандартов качества важно для развития бизнеса. Правильное выбора поставщиков является ключевым фактором для компании, поскольку оно влияет на репутацию и качество напитков.
Сотрудничество с клиентами важны для доставки алкоголя. Нравится клиентам, чтобы компании были в контакте с ними Взаимодействие с клиентами позволяет компании понять их потребности и адаптироваться под них.
Клиенты ожидают получать от компании квалифицированную поддержку. Обязательное сотрудничество с клиентами важно для улучшения качества предоставляемых услуг. Правильное сотрудничество с клиентами является ключевым аспектом бизнеса, поскольку оно влияет на долгосрочное взаимодействие с клиентами.
Доставка алкоголя создает возможности для продвижения бизнеса. Сотрудничество с клиентами может привести к улучшению репутации компании Правильно используемые возможности для продвижения бизнеса могут привести к значительному увеличению прибыли и росту бизнеса.
Например, создание программы лояльности может привлечь новых клиентов. В некоторых случаях лучше сделать что-то иное. Правильная разработка программы лояльности является ключевым аспектом бизнеса, поскольку она влияет на долгосрочное взаимодействие с клиентами.
заказать кухню стоимость [url=https://zakazat-kuhnyu-20.ru]заказать кухню стоимость[/url]
jili slot malaysia [url=http://www.100cuci-10.com]jili slot malaysia[/url]
купить спецтехнику [url=http://tech-group.com.ua]http://tech-group.com.ua[/url]
заказ кухни [url=https://kuhni-spb-58.ru]заказ кухни[/url]
Узнайте все преимущества современной [url=https://allon4-sar.ru/]все зубы сразу[/url] и верните себе красивую улыбку всего за один визит.
Сам процесс установки импланта проходит под местной анестезией и занимает от тридцати минут до часа.
заказать кухню по своим размерам [url=https://zakazat-kuhnyu-17.ru]https://zakazat-kuhnyu-17.ru[/url]
мелбет играть онлайн [url=www.melbet35702.help]мелбет играть онлайн[/url]
Как [url=http://center-2.ru/forum/?mingleforumaction=viewtopic&t=27333#postid-49451]SEO[/url] и SMM работают в связке — есть ли реальная синергия?
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]производство сэндвич панелей в москве[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей на территории Москвы: Особенности и достоинства
1. Современные технологии и сырье для сэндвич-панелей
Современное производство сэндвич-панелей в Москве опирается на передовые технологии и высококачественные материалы.
2. Достоинства использования сэндвич-панелей
Разнообразие цветов и рисунков позволяет реализовать самые смелые архитектурные идеи.
Применение сэндвич-панелей в различных отраслях
Таким образом, эти панели играют центральную роль в прогрессе современной строительной индустрии в Москве.
4. Подбор проверенного поставщика в столице
Значимым моментом является также опция изготовления панелей согласно уникальным параметрам и запросам заказчика.
Запишитесь на консультацию к профессионалу, чтобы узнать, какая [url=https://implant-sar.ru/]установка брекетов[/url] подойдет именно для вашей улыбки.
Исходя из результатов диагностики, будет разработан уникальный алгоритм лечения, адаптированный под конкретные нужды пациента.
бонусы бк [url=https://vitaliyblagodatski.wixsite.com/my-site-4]бонусы бк[/url]
кухни от производителя спб недорого и качественно [url=https://kuhni-spb-61.ru]кухни от производителя спб недорого и качественно[/url]
Для обеспечения стабильной и долговечной работы вашей светодиодной ленты крайне важно подобрать подходящий [url=https://www.bloki-pitaniya-dlya-led.ru/]arlight трансформатор[/url], соответствующий её мощности и напряжению.
Важно помнить, что каждый светодиодный модуль обладает индивидуальной потребляемой мощностью, указанной в его техническом паспорте.
заказать кухню по размерам [url=https://zakazat-kuhnyu-18.ru]заказать кухню по размерам[/url]
Посетите лучший [url=https://www.avtosalon-avtomobiley.ru/]официальные автосалоны[/url] для выгодной покупки автомобиля.
Покупатели вправе ожидать профессионального технического ухода в сертифицированных мастерских.
Найдите надежную стоматологию Саратова на веб-сайте [url=https://topstoma-sar.ru/]лечение кариеса[/url].
Здоровые зубы – ключ к счастливому живу в Саратове
Я хотела бы поговорить о важности стоматологии в Саратове. Стоматология – это не только профессия, она также является важнейшим аспектом нашего здоровья. Здоровые зубы – это не только красота, но также защита от различных заболеваний. В статье мы рассмотрим наиболее часто встречаемые проблемы стоматологии в Саратове и покажем, как можно решить их.
Приходите к нам, и мы поможем вам получить здоровые зубы
Стоматология Саратова – это современное оборудование и высококвалифицированный персонал. В нашей команде опытных стоматологов всегда найдется ответ на любой вопрос.
Наша клиника расположена в удобном местоположении в центре Саратова
Заголовок: Зубные боли – это не только неприятность, но и серьезный диагноз
Самыми популярными проблемами стоматологии в Саратове являются зубные боли. Это может быть обычная зубная боль, но и более серьезные проблемы, такие как зубной скрежет или разболевшийся зуб.
Чтобы избежать зубных болей, нужно правильно ухаживать за зубами
Наши стоматологи имеют опыт лечения различных проблем стоматологии, включая зубные боли.
У нас есть опыт лечения даже самых сложных случаев
Заголовок: Современные технологии стоматологии в Саратове помогут вам избавиться от зубных проблем
Наше лечение заболеваний зубов включает в себя использование новейшего оборудования и современных методов. Это позволяет нам обеспечить высокое качество лечения и быстрое выздоровление пациентов.
У нас есть опытные стоматологи, которые знают, как правильно лечить зубы
Помимо регулярного посещения стоматологической клиники, вам также нужно соблюдать рекомендации по уходу за зубами.
Для того, чтобы иметь здоровые зубы, необходимо правильно чистить и полоскать]
Правильный уход за зубами – это основа здоровья вашего здоровья
Заголовок: Стоматология Саратова – это ключ к здоровому и счастливому живу
В заключение, стоматология Саратова – это современная клиника с высококвалифицированным персоналом. Мы готовы помочь вам решить любые проблемы стоматологии. Наша цель – помочь вам получить здоровые зубы и счастливое житье.
Мы имеем в наличии новейшее оборудование для лечения зубов
нарколога на дом екатеринбург [url=https://narkolog-na-dom-ekaterinburg-11.ru]нарколога на дом екатеринбург[/url]
1win mobile money deposit Uganda [url=http://1win63470.help]http://1win63470.help[/url]
勉強になる 旅行好き必見ブログ! 応援してます! [url=https://iqvel.com/ja/a/%E3%83%89%E3%82%A4%E3%83%84/%E3%82%B5%E3%83%B3%E3%82%B9%E3%83%BC%E3%82%B7%E5%AE%AE%E6%AE%BF]葡萄棚[/url] 計画ツール追加 水場マップ — めちゃ貴重。
Вы можете заказать алкоголь на дом через наш сайт, где работает доставка алкоголя круглосуточная в Москве. [url=https://dostavkaalkogolyaboka.msk.ru/]заказ алкоголя[/url]
Доставка алкоголя должна происходить так быстро, как только это возможно Клиенты ожидают получения алкоголя в кратчайшие сроки, чтобы не терять время на ожидание. Если заказ не доставляется вовремя, клиент может потерять доверие.
Различные компании используют разные методы доставки алкоголя, что позволяет им адаптироваться под конкретные потребности клиентов. В некоторых случаях целесообразно использовать автомобили с холодильными камерами. Правильный выбор метода доставки позволяет компании повысить удовлетворенность клиентов и увеличить прибыли.
Поставщики алкоголя играют решающую роль в доставке алкоголя. Высокое качество алкоголя важно для клиентов. Качество напитков оказывает прямое влияние на репутацию компании, поэтому важно выбирать надежных поставщиков.
Поставщики алкоголя должны соответствовать стандартам качества и безопасности. Поддержание стандартов качества важно для развития бизнеса. Правильное выбора поставщиков является ключевым фактором для компании, поскольку оно влияет на репутацию и качество напитков.
Сотрудничество с клиентами важны для доставки алкоголя. Нравится клиентам, чтобы компании были в контакте с ними Взаимодействие с клиентами позволяет компании понять их потребности и адаптироваться под них.
Клиенты ожидают получать от компании квалифицированную поддержку. Неправильная поддержка.clients может привести к снижению доверия Правильное сотрудничество с клиентами является ключевым аспектом бизнеса, поскольку оно влияет на долгосрочное взаимодействие с клиентами.
Доставка алкоголя создает возможности для продвижения бизнеса. Сотрудничество с клиентами может привести к улучшению репутации компании Правильно используемые возможности для продвижения бизнеса могут привести к значительному увеличению прибыли и росту бизнеса.
Например, создание программы лояльности может привлечь новых клиентов. Программа лояльности обеспечивает новые клиенты Правильная разработка программы лояльности является ключевым аспектом бизнеса, поскольку она влияет на долгосрочное взаимодействие с клиентами.
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]изготовление сэндвич панелей цена[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей на территории Москвы: Особенности и достоинства
Технологии и материалы в производстве сэндвич-панелей
Тщательная проверка качества на каждом этапе изготовления подтверждает соответствие изделий мировым нормативам.
2. Достоинства использования сэндвич-панелей
Сэндвич-панели невосприимчивы к влиянию агрессивных факторов, влажности и температурных колебаний, что обеспечивает их долговечность и поддержание исходных характеристик на протяжении всего периода эксплуатации.
3. Использование сэндвич-панелей в разных сферах
Эти панели широко используются для строительства индустриальных объектов, складов, дистрибьюторских центров и торговых площадок.
Выбор надежного поставщика в Москве
Компании, использующие современное оборудование и квалифицированный персонал, как правило, гарантируют высокое качество продукции и сервиса.
mostbet pariere live app [url=http://mostbet80695.help]http://mostbet80695.help[/url]
мелбет live результаты [url=www.melbet70382.help]www.melbet70382.help[/url]
современные кухни на заказ в спб [url=https://kuhni-spb-59.ru]https://kuhni-spb-59.ru[/url]
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]доставка алкоголя круглосуточно[/url].
При этом не стоит забывать, что в этой сфере присутствуют свои особенности и ряд законодательных барьеров.
Запишитесь на консультацию к профессионалу, чтобы узнать, какая [url=https://implant-sar.ru/]брекеты сколько[/url] подойдет именно для вашей улыбки.
Самым важным периодом после фиксации брекет-системы является время адаптации и соблюдение гигиены.
Для обеспечения стабильной и долговечной работы вашей светодиодной ленты крайне важно подобрать подходящий [url=https://www.bloki-pitaniya-dlya-led.ru/]блоки питания arlight[/url], соответствующий её мощности и напряжению.
Для обеспечения прочного соединения рекомендуется применять специальные разъемы или пайку.
Найдите надежную стоматологию Саратова на веб-сайте [url=https://topstoma-sar.ru/]лечение зубов у детей[/url].
Здоровые зубы – ключ к счастливому живу в Саратове
Я хотела бы поговорить о важности стоматологии в Саратове. Стоматология – это не только профессия, она также является важнейшим аспектом нашего здоровья. Здоровые зубы – это не только красота, но также защита от различных заболеваний. В статье мы рассмотрим наиболее часто встречаемые проблемы стоматологии в Саратове и покажем, как можно решить их.
Приходите к нам, и мы поможем вам получить здоровые зубы
Стоматология Саратова – это современное оборудование и высококвалифицированный персонал. В нашей команде опытных стоматологов всегда найдется ответ на любой вопрос.
У нас есть опытные стоматологи с множеством лет опыту
Заголовок: Проблемы стоматологии в Саратове: главные боли
Самыми популярными проблемами стоматологии в Саратове являются зубные боли. Это может быть обычная зубная боль, но и более серьезные проблемы, такие как зубной скрежет или разболевшийся зуб.
Устранение зубных болей – это ответственность не только стоматолога, но и пациента
Наши стоматологи имеют опыт лечения различных проблем стоматологии, включая зубные боли.
Вы можете быть уверены, что мы сделаем все, что в наших силах, чтобы излечить вас
Заголовок: Современные технологии стоматологии в Саратове помогут вам избавиться от зубных проблем
Наше лечение заболеваний зубов включает в себя использование новейшего оборудования и современных методов. Это позволяет нам обеспечить высокое качество лечения и быстрое выздоровление пациентов.
Наша клиника расположена в центре Саратова, что делает ее доступной для всех
Помимо регулярного посещения стоматологической клиники, вам также нужно соблюдать рекомендации по уходу за зубами.
Для того, чтобы иметь здоровые зубы, необходимо правильно чистить и полоскать]
Правильный уход за зубами – это основа здоровья вашего здоровья
Заголовок: Стоматология Саратова – это ключ к здоровому и счастливому живу
В заключение, стоматология Саратова – это современная клиника с высококвалифицированным персоналом. Мы готовы помочь вам решить любые проблемы стоматологии. Наша цель – помочь вам получить здоровые зубы и счастливое житье.
Приходите к нам, и мы поможем вам получить здоровые зубы
Вы можете заказать алкоголь на дом через наш сайт, где работает доставка алкоголя круглосуточная в Москве. [url=https://dostavkaalkogolyaboka.msk.ru/]доставка алкоголя на дом[/url]
Хорошая доставка алкоголя предполагает быстрое выполнение заказов Клиенты ожидают получения алкоголя в кратчайшие сроки, чтобы не терять время на ожидание. Если заказ не доставляется вовремя, клиент может потерять доверие.
Различные компании используют разные методы доставки алкоголя, что позволяет им адаптироваться под конкретные потребности клиентов. Другие выбирают курьерские службы Правильный выбор метода доставки позволяет компании повысить удовлетворенность клиентов и увеличить прибыли.
Поставщики алкоголя играют решающую роль в доставке алкоголя. Экологическая безопасность является ключевым фактором Качество напитков оказывает прямое влияние на репутацию компании, поэтому важно выбирать надежных поставщиков.
Поставщики алкоголя должны соответствовать стандартам качества и безопасности. Это позволяет компаниям давать гарантию на свои напитки Правильное выбора поставщиков является ключевым фактором для компании, поскольку оно влияет на репутацию и качество напитков.
Сотрудничество с клиентами важны для доставки алкоголя. Сотрудничество с клиентами важно для разработки политики доставки. Взаимодействие с клиентами позволяет компании понять их потребности и адаптироваться под них.
Клиенты ожидают получать от компании квалифицированную поддержку. Неправильная поддержка.clients может привести к снижению доверия Правильное сотрудничество с клиентами является ключевым аспектом бизнеса, поскольку оно влияет на долгосрочное взаимодействие с клиентами.
Доставка алкоголя создает возможности для продвижения бизнеса. Экологическая безопасность является ключевым фактором бизнеса Правильно используемые возможности для продвижения бизнеса могут привести к значительному увеличению прибыли и росту бизнеса.
Например, создание программы лояльности может привлечь новых клиентов. Программа лояльности обеспечивает новые клиенты Правильная разработка программы лояльности является ключевым аспектом бизнеса, поскольку она влияет на долгосрочное взаимодействие с клиентами.
yo has anyone else here tried [url=https://8mbets-onlinecasino.com/]8mbets Onlinecasino[/url] yet? i heard alot of good things and was wondering if u guys would reccommend it or if teh reviews are just hype lol, lemme know what u think plz
888starz ШЄШШЇЩЉШ« [url=https://888starzeg2.com/]888starz ШЄШШЇЩЉШ«[/url].
888starz скачать ios [url=http://androidchity.ru/]888starz скачать ios[/url] .
1win слоты демо [url=https://www.1win68190.help]1win слоты демо[/url]
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]завод по производству сэндвич панелей[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей в Москве: Ключевые аспекты и преимущества
Технологии и материалы в производстве сэндвич-панелей
Это позволяет предлагать клиентам в Москве и Московской области продукцию, соответствующую самым высоким требованиям.
2. Достоинства использования сэндвич-панелей
Разнообразие цветов и рисунков позволяет реализовать самые смелые архитектурные идеи.
3. Использование сэндвич-панелей в разных сферах
Сэндвич-панели оптимальны для восстановления и усовершенствования существующих строений, позволяя быстро и эффективно повысить их энергосбережение и внешний вид.
4. Выбор ответственного партнера в Москве
Проверенный производитель предоставит обширный выбор товаров, рекомендации по подбору наилучшего варианта и быструю доставку.
mostbet jak skontaktować się z supportem [url=www.mostbet90617.help]www.mostbet90617.help[/url]
нарколог на дом круглосуточно воронеж цены [url=https://narkolog-na-dom-voronezh-12.ru]https://narkolog-na-dom-voronezh-12.ru[/url]
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]доставка алкоголя в москве[/url].
Помимо комфорта, скорость доставки также играет важную роль.
скачать видео из ютуб по ссылке [url=https://skachat-video-s-youtube-9.ru]скачать видео из ютуб по ссылке[/url]
888starz uzbekistan [url=https://888starz-uzbekistan5.com]888starz uzbekistan[/url] .
Для обеспечения стабильной и долговечной работы вашей светодиодной ленты крайне важно подобрать подходящий [url=https://www.bloki-pitaniya-dlya-led.ru/]диммируемый блок питания[/url], соответствующий её мощности и напряжению.
Рекомендуется добавлять запас мощности в размере 20-30%, чтобы избежать перегрузки и продлить срок службы устройства.
Найдите надежную стоматологию Саратова на веб-сайте [url=https://topstoma-sar.ru/]лечение зубов у детей[/url].
Стоматологические проблемы: как решить их в Саратове
Я хотела бы поговорить о важности стоматологии в Саратове. Стоматология – это не только профессия, она также является важнейшим аспектом нашего здоровья. Здоровые зубы – это не только красота, но также защита от различных заболеваний. В статье мы рассмотрим наиболее часто встречаемые проблемы стоматологии в Саратове и покажем, как можно решить их.
Приходите к нам, и мы поможем вам получить здоровые зубы
Стоматология Саратова – это современное оборудование и высококвалифицированный персонал. В нашей команде опытных стоматологов всегда найдется ответ на любой вопрос.
Наша клиника расположена в удобном местоположении в центре Саратова
Заголовок: Чаще всего в Саратове встречаются следующие зубные проблемы
Самыми популярными проблемами стоматологии в Саратове являются зубные боли. Это может быть обычная зубная боль, но и более серьезные проблемы, такие как зубной скрежет или разболевшийся зуб.
Чтобы избежать зубных болей, нужно правильно ухаживать за зубами
Наши стоматологи имеют опыт лечения различных проблем стоматологии, включая зубные боли.
Вы можете быть уверены, что мы сделаем все, что в наших силах, чтобы излечить вас
Заголовок: Лечение стоматологии в Саратове: современные технологии
Наше лечение заболеваний зубов включает в себя использование новейшего оборудования и современных методов. Это позволяет нам обеспечить высокое качество лечения и быстрое выздоровление пациентов.
У нас есть опытные стоматологи, которые знают, как правильно лечить зубы
Помимо регулярного посещения стоматологической клиники, вам также нужно соблюдать рекомендации по уходу за зубами.
Для того, чтобы иметь здоровые зубы, необходимо правильно чистить и полоскать]
Правильный уход за зубами – это основа здоровья вашего здоровья
Заголовок: Стоматология Саратова – это ключ к здоровому и счастливому живу
В заключение, стоматология Саратова – это современная клиника с высококвалифицированным персоналом. Мы готовы помочь вам решить любые проблемы стоматологии. Наша цель – помочь вам получить здоровые зубы и счастливое житье.
Мы имеем в наличии новейшее оборудование для лечения зубов
оптимизация наружки [url=https://reklamnyj-kreativ20.ru]оптимизация наружки[/url]
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]производство сэндвич панелей на заказ[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей на территории Москвы: Особенности и достоинства
1. Инновации и компоненты в изготовлении сэндвич-панелей
Обычно для утепления применяют минеральную вату, пенополистирол или пенополиуретан, каждый из которых имеет свои специфические характеристики.
Преимущества использования сэндвич-панелей
Небольшой вес панелей снижает нагрузку на основание, что дает возможность экономить на его строительстве.
3. Использование сэндвич-панелей в разных сферах
Благодаря своим универсальным свойствам, сэндвич-панели находят широкое применение в различных отраслях строительства в Москве.
4. Выбор ответственного партнера в Москве
Предприятия, применяющие актуальное оборудование и имеющие компетентный персонал, обычно обеспечивают превосходное качество продукции и обслуживания.
[url=https://dostavkaalkogolyaplan.msk.ru/]доставка алкоголя москва[/url] — это удобный сервис для тех, кто ценит комфорт и оперативность.
Ваш надежный помощник: Доставка алкоголя на дом. В частности, услуга доставки алкоголя на дом становится все более востребованной. Это прекрасное решение для организации вечеринки, спонтанного празднования или экономии времени на посещение торговой точки. Наш ассортимент включает в себя богатый выбор напитков на любой вкус: от крепких до изысканных вин и разнообразных сортов пива.
Наша главная задача – гарантировать удобство и быструю доставку. Благодаря нашей развитой логистической системе, вы можете быть уверены, что ваш заказ будет доставлен точно в срок. Круглосуточный режим работы позволяет наслаждаться напитками тогда, когда вам это удобно. Все наши курьеры проходят строгий отбор и обучение, чтобы обеспечить высокий уровень сервиса.
Мы рады предложить клиентам только сертифицированную продукцию от ведущих мировых и российских производителей. В нашем каталоге представлены алкогольные напитки различных категорий: от элитного коньяка и виски до легких коктейлей и сидров. Каждая позиция проходит строгий отбор, чтобы гарантировать безупречное качество и соответствие стандартам. Ассортимент регулярно пополняется новинками и эксклюзивными предложениями.
Понимая, что у каждого клиента свои предпочтения, мы стараемся угодить каждому. Наши консультанты всегда готовы помочь с выбором, дать рекомендации и рассказать об особенностях того или иного напитка. Ваше доверие – наша ценность, поэтому мы стараемся сделать выбор удобным и информативным. В дополнение к алкоголю, у нас можно заказать закуски и безалкогольные напитки, чтобы ваш стол был полностью укомплектован.
Легкость оформления и моментальная доставка. Доступны следующие способы заказа: через наш веб-сайт, мобильное приложение или по телефону. Интуитивно понятный интерфейс позволяет быстро найти нужный товар, добавить его в корзину и оформить покупку. Мы предлагаем различные способы оплаты, включая онлайн-платежи и оплату наличными при получении.
Служба доставки работает с высокой оперативностью. После подтверждения, алкоголь будет доставлен максимально быстро, в зависимости от вашего местоположения. Мы обеспечиваем полную конфиденциальность и безопасность вашей информации. Все заказы доставляются в специальных термосумках, чтобы напитки сохраняли идеальную температуру.
Выбирая нашу службу, вы получаете надежность, скорость и качество доставки алкоголя. Мы понимаем, как важно получить желаемое быстро и без лишних хлопот. Поэтому мы постоянно совершенствуем наш сервис, внедряем новые технологии и обучаем персонал. Сотни довольных клиентов, которые доверяют нам свои вечера и торжества, формируют нашу репутацию.
Мы неукоснительно соблюдаем все законодательные требования к продаже и доставке алкоголя. Доставка производится исключительно совершеннолетним лицам при предъявлении документов, подтверждающих их возраст. Мы заботимся о вашей безопасности и соблюдаем все необходимые меры предосторожности. Доверьте нам заботу о напитках, и мы гарантируем ваше полное удовлетворение нашим сервисом.
Запишитесь на консультацию к профессионалу, чтобы узнать, какая [url=https://implant-sar.ru/]стоматолог ортодонт[/url] подойдет именно для вашей улыбки.
Обязательными являются и частые посещения ортодонта для корректировки аппаратуры и мониторинга хода лечения.
mostbet app açılmır iphone [url=https://mostbet48932.help/]mostbet app açılmır iphone[/url]
капельница после запоя цена [url=https://kapelnicza-ot-pokhmelya-samara-23.ru]капельница после запоя цена[/url]
скачивать по ссылке с ютуба [url=https://skachat-video-s-youtube-12.ru]скачивать по ссылке с ютуба[/url]
Вы можете заказать алкоголь на дом через наш сайт, где работает доставка алкоголя круглосуточная в Москве. [url=https://dostavkaalkogolyaboka.msk.ru/]доставка алкоголя москва[/url]
Доставка алкоголя должна происходить так быстро, как только это возможно Клиенты ожидают получения алкоголя в кратчайшие сроки, чтобы не терять время на ожидание. Если заказ не доставляется вовремя, клиент может потерять доверие.
Различные компании используют разные методы доставки алкоголя, что позволяет им адаптироваться под конкретные потребности клиентов. Другие выбирают курьерские службы Правильный выбор метода доставки позволяет компании повысить удовлетворенность клиентов и увеличить прибыли.
Поставщики алкоголя играют решающую роль в доставке алкоголя. Высокое качество алкоголя важно для клиентов. Качество напитков оказывает прямое влияние на репутацию компании, поэтому важно выбирать надежных поставщиков.
Поставщики алкоголя должны соответствовать стандартам качества и безопасности. Поддержание стандартов качества важно для развития бизнеса. Правильное выбора поставщиков является ключевым фактором для компании, поскольку оно влияет на репутацию и качество напитков.
Сотрудничество с клиентами важны для доставки алкоголя. Это позволяет клиентам выражать свои потребности Взаимодействие с клиентами позволяет компании понять их потребности и адаптироваться под них.
Клиенты ожидают получать от компании квалифицированную поддержку. Обязательное сотрудничество с клиентами важно для улучшения качества предоставляемых услуг. Правильное сотрудничество с клиентами является ключевым аспектом бизнеса, поскольку оно влияет на долгосрочное взаимодействие с клиентами.
Доставка алкоголя создает возможности для продвижения бизнеса. Экологическая безопасность является ключевым фактором бизнеса Правильно используемые возможности для продвижения бизнеса могут привести к значительному увеличению прибыли и росту бизнеса.
Например, создание программы лояльности может привлечь новых клиентов. Программа лояльности обеспечивает новые клиенты Правильная разработка программы лояльности является ключевым аспектом бизнеса, поскольку она влияет на долгосрочное взаимодействие с клиентами.
Посетите лучший [url=https://www.avtosalon-avtomobiley.ru/]элитные автомобили москва[/url] для выгодной покупки автомобиля.
Посетители уважают личный подход и содействие в определении идеальной комплектации авто.
заказать кухню с замером [url=https://zakazat-kuhnyu-19.ru]https://zakazat-kuhnyu-19.ru[/url]
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]алкоголь на дом[/url].
Одним из ключевых достоинств сервиса по доставке алкоголя является неоспоримое удобство, предлагаемое его клиентам.
Узнайте все преимущества современной [url=https://allon4-sar.ru/]имплантация под ключ[/url] и верните себе красивую улыбку всего за один визит.
Имплантация зубов представляет собой прогрессивную стоматологическую процедуру, которая позволяет полностью восстановить утраченные зубы.
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]производство сэндвич панелей компании[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей на территории Москвы: Особенности и достоинства
Технологии и материалы в производстве сэндвич-панелей
Обычно для утепления применяют минеральную вату, пенополистирол или пенополиуретан, каждый из которых имеет свои специфические характеристики.
2. Выгоды от применения сэндвич-панелей
Одним из главных достоинств является быстрая установка, что существенно уменьшает время, необходимое для возведения сооружений.
3. Применение сэндвич-панелей в различных секторах экономики
Они также незаменимы при строительстве холодильных камер, морозильных складов и сельскохозяйственных объектов, где требуются особые условия температурного режима.
4. Подбор проверенного поставщика в столице
Значимым моментом является также опция изготовления панелей согласно уникальным параметрам и запросам заказчика.
как получить бонус mostbet [url=https://mostbet09486.help]https://mostbet09486.help[/url]
Запишитесь на консультацию к профессионалу, чтобы узнать, какая [url=https://implant-sar.ru/]стоматолог ортодонт[/url] подойдет именно для вашей улыбки.
Эстетичные керамические и сапфировые системы практически незаметны, однако их стоимость может быть выше.
запоминаемость рекламы [url=https://reklamnyj-kreativ19.ru]https://reklamnyj-kreativ19.ru[/url]
Найдите надежную стоматологию Саратова на веб-сайте [url=https://topstoma-sar.ru/]установка пломбы[/url].
Стоматологические проблемы: как решить их в Саратове
Я хотела бы поговорить о важности стоматологии в Саратове. Стоматология – это не только профессия, она также является важнейшим аспектом нашего здоровья. Здоровые зубы – это не только красота, но также защита от различных заболеваний. В статье мы рассмотрим наиболее часто встречаемые проблемы стоматологии в Саратове и покажем, как можно решить их.
В Саратове есть множество стоматологических клиник, готовых помочь
Стоматология Саратова – это современное оборудование и высококвалифицированный персонал. В нашей команде опытных стоматологов всегда найдется ответ на любой вопрос.
У нас есть опытные стоматологи с множеством лет опыту
Заголовок: Чаще всего в Саратове встречаются следующие зубные проблемы
Самыми популярными проблемами стоматологии в Саратове являются зубные боли. Это может быть обычная зубная боль, но и более серьезные проблемы, такие как зубной скрежет или разболевшийся зуб.
Чтобы избежать зубных болей, нужно правильно ухаживать за зубами
Наши стоматологи имеют опыт лечения различных проблем стоматологии, включая зубные боли.
У нас есть опыт лечения даже самых сложных случаев
Заголовок: Современные технологии стоматологии в Саратове помогут вам избавиться от зубных проблем
Наше лечение заболеваний зубов включает в себя использование новейшего оборудования и современных методов. Это позволяет нам обеспечить высокое качество лечения и быстрое выздоровление пациентов.
Наша клиника расположена в центре Саратова, что делает ее доступной для всех
Помимо регулярного посещения стоматологической клиники, вам также нужно соблюдать рекомендации по уходу за зубами.
Для того, чтобы иметь здоровые зубы, необходимо правильно чистить и полоскать]
Обязательно посещайте стоматологическую клинику для регулярного осмотра
Заголовок: Присоединяйтесь к нам, и мы поможем вам получить здоровые зубы
В заключение, стоматология Саратова – это современная клиника с высококвалифицированным персоналом. Мы готовы помочь вам решить любые проблемы стоматологии. Наша цель – помочь вам получить здоровые зубы и счастливое житье.
У нас есть опытные стоматологи с множеством лет опыту
Для обеспечения стабильной и долговечной работы вашей светодиодной ленты крайне важно подобрать подходящий [url=https://www.bloki-pitaniya-dlya-led.ru/]блоки питания arlight купить[/url], соответствующий её мощности и напряжению.
Для обеспечения безопасной и длительной работы системы освещения, выбирайте степень защиты, соответствующую условиям ее использования.
[url=http://center-2.ru/forum/?mingleforumaction=viewtopic&t=27353#postid-49474]Управление репутацией[/url] — как работать с отзывами сотрудников на hh.ru?
[url=https://dostavkaalkogolyaplan.msk.ru/]алкоголь с доставкой[/url] — это удобный сервис для тех, кто ценит комфорт и оперативность.
Доставка алкоголя: Комфорт и скорость в одном флаконе. Услуга доставки алкогольных напитков на дом в последнее время набирает обороты. Это идеальное решение для тех, кто планирует вечеринку, спонтанно решил отметить событие или просто не хочет тратить время на поход в магазин. Наш ассортимент включает в себя богатый выбор напитков на любой вкус: от крепких до изысканных вин и разнообразных сортов пива.
Мы стремимся к максимальному комфорту и оперативности обслуживания. Благодаря нашей развитой логистической системе, вы можете быть уверены, что ваш заказ будет доставлен точно в срок. Круглосуточный режим работы позволяет наслаждаться напитками тогда, когда вам это удобно. Все наши курьеры проходят строгий отбор и обучение, чтобы обеспечить высокий уровень сервиса.
Разнообразие и безупречное качество продукции. В нашем каталоге представлены алкогольные напитки различных категорий: от элитного коньяка и виски до легких коктейлей и сидров. Каждая позиция тщательно отбирается, чтобы гарантировать высочайшее качество и соответствие всем стандартам. Мы постоянно обновляем наш ассортимент, предлагая новинки и эксклюзив.
Мы осознаем уникальность предпочтений каждого клиента, поэтому стремимся удовлетворить любые запросы. Наши консультанты всегда готовы помочь с выбором, дать рекомендации и рассказать об особенностях того или иного напитка. Мы ценим ваше доверие и стремимся сделать процесс выбора максимально приятным и информативным. Чтобы ваш стол был полностью укомплектован, вы можете заказать не только алкоголь, но и закуски, а также безалкогольные напитки.
Удобство заказа и оперативная доставка. Вы можете сделать это через наш удобный веб-сайт, мобильное приложение или по телефону. Интуитивный интерфейс помогает быстро найти и добавить в корзину нужный товар, а затем оформить заказ. У нас предусмотрены различные варианты оплаты: онлайн-платежи и оплата наличными при доставке.
Наша служба доставки работает максимально оперативно. После подтверждения заказа, ваш алкоголь будет доставлен в кратчайшие сроки, в зависимости от вашего местоположения. Мы гарантируем конфиденциальность и безопасность всех данных. Все заказы доставляются в специально оборудованных термосумках, чтобы напитки сохраняли свою оптимальную температуру.
Выбирая нашу службу, вы получаете надежность, скорость и качество доставки алкоголя. Мы осознаем, насколько важно получить желаемое оперативно и без трудностей. Мы постоянно улучшаем сервис, внедряем инновации и проводим обучение персонала. Наша репутация – это сотни довольных клиентов, которые доверяют нам свои вечера и праздники.
Мы неукоснительно соблюдаем все законодательные требования к продаже и доставке алкоголя. Доставка производится исключительно совершеннолетним лицам при предъявлении документов, подтверждающих их возраст. Мы заботимся о вашей безопасности и следуем всем мерам предосторожности. Доверьте нам заботу о напитках, и мы гарантируем ваше полное удовлетворение нашим сервисом.
Запишитесь на консультацию к профессионалу, чтобы узнать, какая [url=https://implant-sar.ru/]стоят брекеты[/url] подойдет именно для вашей улыбки.
Полная незаметность лингвальных брекетов достигается за счет их установки с язычной стороны.
Посетите лучший [url=https://www.avtosalon-avtomobiley.ru/]премиум машины[/url] для выгодной покупки автомобиля.
Эксперты содействуют в быстром заполнении требуемой документации.
Ищете надежное [url=https://proizvodstvo-sendvich-panelej-v-moskve.ru/]производство сэндвич панелей москва и московская область[/url] с высоким качеством продукции и выгодными ценами?
Производство сэндвич-панелей на территории Москвы: Особенности и достоинства
Технологии и материалы в производстве сэндвич-панелей
Актуальное изготовление сэндвич-панелей на московских предприятиях базируется на инновационных методах и первоклассном сырье.
2. Выгоды от применения сэндвич-панелей
Разнообразие цветов и рисунков позволяет реализовать самые смелые архитектурные идеи.
3. Применение сэндвич-панелей в различных секторах экономики
Из-за своих универсальных характеристик, сэндвич-панели активно используются в различных строительных сегментах Москвы.
4. Подбор проверенного поставщика в столице
Выбирая поставщика сэндвич-панелей в московском регионе, необходимо учитывать его авторитет, опыт и наличие документов, подтверждающих качество.
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]доставка алкоголя 24[/url].
В большинстве случаев, в ночное время доставка алкогольной продукции запрещена согласно действующему местному законодательству.
تنزيل تطبيق 888starz [url=888-starzeg.com]888starz 1xbet[/url]
Для обеспечения стабильной и долговечной работы вашей светодиодной ленты крайне важно подобрать подходящий [url=https://www.bloki-pitaniya-dlya-led.ru/]arlight трансформатор[/url], соответствующий её мощности и напряжению.
Не стоит экономить на блоке питания, так как некачественное устройство может привести к мерцанию ленты или ее преждевременному выходу из строя.
Узнайте все преимущества современной [url=https://allon4-sar.ru/]коронка на зуб цена[/url] и верните себе красивую улыбку всего за один визит.
Пациенты подчеркивают превосходную эстетику и восстановление жевательных возможностей уже через пару месяцев после завершения лечения.
Найдите надежную стоматологию Саратова на веб-сайте [url=https://topstoma-sar.ru/]профессиональная чистка зубов[/url].
Здоровые зубы – ключ к счастливому живу в Саратове
Я хотела бы поговорить о важности стоматологии в Саратове. Стоматология – это не только профессия, она также является важнейшим аспектом нашего здоровья. Здоровые зубы – это не только красота, но также защита от различных заболеваний. В статье мы рассмотрим наиболее часто встречаемые проблемы стоматологии в Саратове и покажем, как можно решить их.
Приходите к нам, и мы поможем вам получить здоровые зубы
Стоматология Саратова – это современное оборудование и высококвалифицированный персонал. В нашей команде опытных стоматологов всегда найдется ответ на любой вопрос.
Наша клиника расположена в удобном местоположении в центре Саратова
Заголовок: Проблемы стоматологии в Саратове: главные боли
Самыми популярными проблемами стоматологии в Саратове являются зубные боли. Это может быть обычная зубная боль, но и более серьезные проблемы, такие как зубной скрежет или разболевшийся зуб.
Устранение зубных болей – это ответственность не только стоматолога, но и пациента
Наши стоматологи имеют опыт лечения различных проблем стоматологии, включая зубные боли.
Наши методы лечения зубных болей гарантируют вам быстрое выздоровление
Заголовок: Старайтесь регулярно посещать стоматологическую клинику в Саратове
Наше лечение заболеваний зубов включает в себя использование новейшего оборудования и современных методов. Это позволяет нам обеспечить высокое качество лечения и быстрое выздоровление пациентов.
Наши современные технологии стоматологии гарантируют вам точный и быстрый результат
Помимо регулярного посещения стоматологической клиники, вам также нужно соблюдать рекомендации по уходу за зубами.
Для того, чтобы иметь здоровые зубы, необходимо правильно чистить и полоскать]
Обязательно посещайте стоматологическую клинику для регулярного осмотра
Заголовок: Здоровые зубы – это не только красивая улыбка, но и защита от различных заболеваний
В заключение, стоматология Саратова – это современная клиника с высококвалифицированным персоналом. Мы готовы помочь вам решить любые проблемы стоматологии. Наша цель – помочь вам получить здоровые зубы и счастливое житье.
Приходите к нам, и мы поможем вам получить здоровые зубы
888starz مهكر [url=http://www.888starzeg3.com]لعبه 888starz[/url]
автомобили БУ Молдова [url=http://ag.ru/collections/prodazha-avtomobilia-tri-pravila-kotorye-rabotaiut]автомобили БУ Молдова[/url] .
Информация о проверке качества продукции повышает лояльность клиентов
https://redmetsplav.ru/store/titan/rossiyskie-splavy-4/titan-vt23—ost-1-90013-81/lenta-titanovaya-vt23—ost-1-90013-81/
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]доставка алкоголя в москве[/url].
доставка алкоголя — это быстро развивающаяся отрасль, которая позволяет заказывать алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
Доставка алкоголя в городе может быть организована посредством автомобилей или курьерских служб.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя дает возможность заказывать алкогольные напитки прямо с работы или дома и доставлять их к выходным.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
Заказать доставку алкоголя можно обычно через интернет-сайт или мобильное приложение поставщика.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
При выборе сервиса доставки алкоголя нужно обязательно уделять внимание качеству предоставляемых напитков и условиям транспортировки.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
В некоторых странах и провинциях существует отдельный возраст для покупки алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
вызов нарколога [url=https://narkolog-na-dom-ekaterinburg-12.ru]вызов нарколога[/url]
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]заказ алкоголя[/url].
Крайне важно перед совершением заказа внимательно изучить правила выбранной службы и местные законодательные акты, чтобы избежать возможных проблем.
Если вы ищете надежные и доступные [url=https://kontrol-braslet.ru/]печать бумажных браслетов[/url], наши бумажные браслеты для контроля обеспечивают надежную безопасность и легко адаптируются под любые требования ваших мероприятий.
Использование бумажных браслетов для контроля приобретает все большую популярность на мероприятиях,
они позволяют легко идентифицировать участников, выступая удобным инструментом для учета посетителей, что особенно важно при большом количестве присутствующих.
Материалы для изготовления бумажных браслетов тщательно подбираются, чтобы быть безопасными и экологичными,
им удобна простота использования и возможность быстрого нанесения специальной маркировки или штампа.
Преимущества бумажных браслетов включают их низкую стоимость,
что позволяет использовать их даже на больших мероприятиях без существенных затрат.
Создавать их можно с различными дизайнами и логотипами,
что помогает повысить уровень контроля и исключить возможность подделки.
Если вы ищете качественный [url=https://www.netskolov.ru/]ремонт сколов лкп автомобиля[/url] в Москве, то наши специалисты быстро восстановят внешний вид вашего автомобиля, устранив все сколы и повреждения лакокрасочного покрытия.
Исправление сколов на кузове машины — это необходимый шаг для поддержания ее презентабельного вида .
Многие владельцы автомобилей сталкиваются с повреждениями кузова, и своевременное устранение таких дефектов помогает избежать более серьезных проблем в будущем .
Очистка поверхности перед ремонтом — залог качественного и долговечного восстановление .
Для устранения сколов используют различные методы, включая использование ремонтных комплектов и полировку .
После подготовки поверхности можно приступить к нанесению ремонтных составов, следуя инструкциям производителя .
Для достижения максимально хорошего результата рекомендуется выполнить шлифовку и полировку после ремонта .
Чем быстрее выполняется ремонт, тем меньше риск появления ржавчины и более серьезных повреждений .
Обращение к специалистам гарантирует качественный и долговечный результат, потому что у профессионалов есть опыт и необходимые инструменты .
зеркало 888starz [url=888starz-uzs.net]888starz-uzs.net[/url] .
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]доставка алкоголя москва[/url].
Торонто доставка алкоголя — это удобный способ купить алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
Доставка алкоголя в городе может быть организована посредством автомобилей или курьерских служб.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя позволяет экономить время и деньги по сравнению с покупкой алкоголя в магазине.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
Часть поставщиков предоставляет возможность приценивать стоимость доставки до передачи заказа.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
Однако, как и в любой другой покупке алкоголя, есть определенные риски, связанные с доставкой.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Некоторые методы оплаты могут не быть доступны для оплаты алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
Если вы ищете качественный [url=https://kupit-septik01.ru/]установка септика в доме цена[/url] — отличный выбор для организации автономной канализации.
После приобретения и установки важно регулярно проводить обслуживание и проверку системы.
|888starz global [url=https://888starz-egypt2.com]https://888starz-egypt2.com/[/url]
|888 starz [url=http://www.888starz-egypt-casino.com/]https://888starz-egypt-casino.com/[/url]
888 kasino [url=888starz-bet1.com]888starz-bet1.com[/url] .
تحميل 888starz [url=http://www.world-cuisine.com]https://world-cuisine.com/[/url]
888starz site [url=https://888starz-uzbekistan1.com]https://888starz-uzbekistan1.com[/url] .
Хотите обеспечить свое будущее и стабильность, заключив контракт на свою службу? Подробнее о возможностях и условиях вы можете узнать на нашей странице: [url=https://sluzbapokontrantu.ru/]контракт на сво выплаты[/url].
Подписания договора всегда предшествует тщательное оформление.
Перед подписанием важно внимательно ознакомиться с условиями документа.
Тщательное рассмотрение условий контракта способствует успешной реализации проекта.
В процессе оформления важно четко прописать все важные пункты.
Особое внимание стоит уделить срокам, финансам и ответственности сторон.
Обсудите все возможные корректировки и штрафы на стадии подготовки.
Обсуждение условий — залог правильного заключения договора.
Обязательно уточняйте все спорные пункты и вопросы.
Важно сохранять профессиональный настрой и открытость к компромиссам.
Важен тщательный финальный просмотр перед подписью.
Обязательно сверяйте финальную редакцию с договоренностями, достигнутыми в переговорах.
Подписание контракта должно сопровождаться присутствием обеих сторон.
Комплексное решение для безопасности и комфорта вашего участка — [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]монтаж откатных ворот[/url].
В последнее время всё чаще можно увидеть откатные ворота у жилых комплексов и коммерческих объектов.
Один из ключевых плюсов данных ворот — плавное и быстрое открытие.
Откатные ворота позволяют значительно сэкономить пространство вокруг входа .
Материалы, используемые для изготовления откатных ворот, достаточно разнообразны .
При выборе откатных ворот важно учитывать их толщину и конструкцию .
Для монтажа откатных ворот требуется особая техника и опыт .
Автоматизация откатных ворот позволяет управлять ими дистанционно .
Регулярная чистка и смазка узлов обеспечивают их стабильную работу.
Надежность и качество автоматики напрямую влияют на долговечность ворот.
Такие ворота станут отличным дополнением к любому загородному дому или коммерческому объекту.
voucher melbet [url=https://melbet52780.help]https://melbet52780.help[/url]
Купить забор из профнастила легко и выгодно, воспользовавшись [url=https://www.dachniy-zabor-iz-profnastil.ru/]установка забора из профлиста цена за работу[/url].
Для успешной покупки забор из профнастила нужно ознакомиться с ассортиментом и выбрать оптимальный вариант.
мелбет оинаи нав [url=http://melbet74319.help]http://melbet74319.help[/url]
путевка в питер на 7 дней на двоих [url=https://www.tury-v-spb.com]https://www.tury-v-spb.com[/url]
1win instant games [url=https://1win65382.help]https://1win65382.help[/url]
castiguri aviator melbet [url=https://melbet95431.help/]https://melbet95431.help/[/url]
pin-up términos retiro [url=https://www.pinup2004.help]https://www.pinup2004.help[/url]
1win обновление apk [url=http://1win63851.help/]http://1win63851.help/[/url]
mostbet Fargʻona uzcard [url=http://mostbet48217.help]mostbet Fargʻona uzcard[/url]
Использование [url=https://kontrol-braslety.ru/]браслеты одноразовые бумажные для контроля[/url] — это эффективное решение для контроля доступа и учета участников мероприятий.
Браслеты создаются из качественной бумаги, устойчивой к влаге и повреждениям.
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]алкоголь круглосуточно[/url].
Торонто доставка алкоголя — это удобный способ купить алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
Доставка алкоголя в городе может быть организована посредством автомобилей или курьерских служб.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Преимуществами доставки алкоголя являются быстрота, удобство и возможность получить доступ к широкому ассортименту алкогольных напитков прямо на дому.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
В зависимости от региона и выбранного поставщика, заказчик может выбрать конкретную дату и время доставки.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
В некоторых случаях, доставка алкоголя может быть запрещена в конкретном регионе или государстве.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Некоторые методы оплаты могут не быть доступны для оплаты алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
Как выглядит юридически грамотный договор на [url=https://prodvizhenie-sajta-s-garantiej.ru]продвижение сайта с гарантией[/url]?
mostbet bonus za registraci [url=www.mostbet41862.help]www.mostbet41862.help[/url]
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]алкоголь круглосуточно[/url].
доставка алкоголя — это быстро развивающаяся отрасль, которая позволяет заказывать алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
в крупных городах доставка алкоголя может быть осуществлена посредством специализированных компаний.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя дает возможность заказывать алкогольные напитки прямо с работы или дома и доставлять их к выходным.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
Заказать доставку алкоголя можно обычно через интернет-сайт или мобильное приложение поставщика.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
В некоторых случаях, доставка алкоголя может быть запрещена в конкретном регионе или государстве.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Крыша или другие ограничующие факторы доставки могут быть предоставлены поставщиком.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
٨٨٨ ستارز [url=http://888starz-3.com/]https://888starz-3.com/[/url]
888straz [url=http://888starz-eg3.org/]https://888starz-eg3.org/[/url]
mostbet версия для ios [url=www.mostbet20581.help]www.mostbet20581.help[/url]
1win bonus çevirmə nədir [url=1win07453.help]1win07453.help[/url]
Если у вас появились [url=https://www.netskolov.ru/]подкраска сколов[/url] невозможно оставить без внимания.
Устранение сколов на кузове — необходимая процедура для поддержания внешнего вида авто. Несвоевременное устранение дефектов может ухудшить состояние кузова и снизить его прочность. Важно провести работу так, чтобы не было видно признаков ремонта и сохранить первоначальный внешний вид.
Перед тем, как начать ремонт, необходимо определиться с методикой устранения повреждений. В зависимости от размера и глубины повреждения используют различные технологии — от простого закраса до восстановления кузова с помощью специального оборудования. Важно соблюдать технологию, чтобы избежать повторных повреждений и добиться максимально качественного результата.
После завершения ремонта необходимо провести финальную обработку поверхности. Такая обработка предотвращает появление новых сколов и ухудшение внешнего вида кузова. Только правильное и своевременное восстановление позволит сохранить автомобиль в отличном состоянии на долгое время.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслеты одноразовые бумажные для контроля[/url].
Бумажные браслеты для контроля становятся все более популярными в современном мире.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Эффективность и удобство делают их незаменимыми в различных областях.
Расширение применения связано с необходимостью повышения уровня контроля и безопасности.
Бумажные браслеты для контроля продолжают завоевывать доверие благодаря своей универсальности и эффективности.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
В целом, бумажные браслеты остаются одним из самых удобных и доступных способов контроля на сегодняшний день.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота для дома[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Для тех, кто ищет надежное решение для входа в дворе, покупка откатных ворот с установкой является отличным выбором.
Чтобы обеспечить свою безопасность и выполнение служебных обязанностей, я рекомендую [url=https://sluzbapokontrantu.ru/]как заключить контракт на сво[/url].
Перед тем как оформить контракт, важно тщательно изучить все условия и особенности предлагаемого документа.
Процесс подписания контракта состоит из сбор документов, согласование условий и подписание соглашения. Все эти шаги играет важную роль в обеспечении успешности и юридической чистоты сделки.
Важно учитывать соблюдение всех правовых требований для минимизации рисков и предотвращения возможных споров. Следует также обратить внимание на проведение предварительной консультации с юристами, специализирующимися на военном праве.
Когда все документы будут готовы — контракт считается заключенным, и можно приступать к выполнению условий соглашения. Тщательная подготовка документов способствует успешной реализации проекта и защите интересов сторон.
888starx [url=888starz-eg-egypt3.com]https://888starz-eg-egypt3.com/[/url]
Для надежной канализации на вашем участке рекомендуем [url=https://kupit-septik01.ru/]установка септиков московская область[/url] по выгодной цене и с гарантией качества.
Приобретение септика — необходимая часть обустройства загородного дома. Перед тем как купить септик, стоит тщательно изучить рынок. Это поможет выбрать наиболее подходящую модель, учитывая ваши потребности. При выборе септика нужно учитывать качество материалов и производительность. Не менее важна цена и наличие гарантийного обслуживания.
Рекомендуется получить консультацию у специалистов или ознакомиться с отзывами о моделях. Это снизит риск ошибок и поможет выбрать подходящее решение. Экономия на качестве может привести к более частым проблемам и дополнительным затратам. Обратите внимание на отзывы и рекомендации других покупателей, чтобы сделать правильный выбор. Учитывайте особенности участка и типа грунта, чтобы купить оптимальную модель.
Не менее важно, чтобы выбранный септик соответствовал техническим требованиям и позволял легко устанавливаться. Проведите сравнение различных вариантов и остановитесь на самом подходящем. Качественный септик — залог комфортного и беспроблемного проживания. Долговечность и надежность септика сделают ваши вложения оправданными. Не забудьте уточнить условия доставки и монтажа при покупке, чтобы избежать дополнительных затрат.
mostbet login app [url=http://mostbet56934.help/]http://mostbet56934.help/[/url]
Если вы решили купить забор из профнастила, воспользуйтесь нашим [url=https://www.dachniy-zabor-iz-profnastil.ru/]рассчитать стоимость забора из профлиста[/url], чтобы рассчитать стоимость и подобрать лучший вариант.
Выбор забора из профнастила для вашего участка – разумное и выгодное вложение.
Основные качества профнастила — надежность и разнообразие дизайнов.
Установка ограждения не отнимает много времени и сил, даже без профессионалов.
Благодаря гофрированной поверхности листы получаются жесткими и долговечными.
mostbet bank kartı ilə depozit [url=https://mostbet68324.help/]mostbet bank kartı ilə depozit[/url]
mostbet numer telefonu polska [url=https://mostbet82175.help/]https://mostbet82175.help/[/url]
[url=https://kontrol-braslety.ru/]контрольные браслеты купить[/url] являются эффективным инструментом для контроля доступа и учета участников различных мероприятий.
Бумажные браслеты для контроля являются популярным инструментом считаются эффективным методом используют часто для проведения различных мероприятий. в сфере безопасности и организации организации событий. Они легко надеваются и снимаются легко устанавливаются и снимаются, что делает их удобными для использования в эксплуатации. Их можно легко украсить оформить логотипами, номерами или дополнительной информацией, что повышает увеличивает их функциональность.
melbet кз фрибет [url=http://melbet85713.help]http://melbet85713.help[/url]
Пользуйтесь удобной услугой: [url=https://mskdostavkaalkogolya.msk.ru/]доставка алкоголя на дом москва круглосуточно[/url].
Теперь не нужно тратить время на дорогу к торговой точке, томиться в очередях и переносить тяжести.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]печать бумажных браслетов[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Особенностями таких браслетов являются практичность и простота использования.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Эффективность и удобство делают их незаменимыми в различных областях.
Расширение применения связано с необходимостью повышения уровня контроля и безопасности.
Популярность бумажных браслетов объясняется их многофункциональностью и простотой.
Они значительно улучшают процессы мониторинга и контроля ситуации.
В целом, бумажные браслеты остаются одним из самых удобных и доступных способов контроля на сегодняшний день.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]установка откатных ворот в московской области[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
В ассортименте есть модели разного дизайна, материала и стоимости, что позволяет сделать оптимальный выбор.
Для надежной канализации на вашем участке рекомендуем [url=https://kupit-septik01.ru/]монтаж септика[/url] по выгодной цене и с гарантией качества.
Приобретение септика — необходимая часть обустройства загородного дома. Перед тем, как сделать выбор, важно понять особенности различных септиков. Это поможет выбрать наиболее подходящую модель, учитывая ваши потребности. При выборе септика нужно учитывать качество материалов и производительность. Не менее важна цена и наличие гарантийного обслуживания.
Перед покупкой септика рекомендуется проконсультироваться с специалистами или прочитать отзывы покупателей. Это поможет избежать ошибок при выборе и сделать правильный выбор. Цена иногда обманчива — лучше выбрать проверенную модель, чтобы не пожалеть о приобретении. Обратите внимание на отзывы и рекомендации других покупателей, чтобы сделать правильный выбор. Также важно учитывать условия эксплуатации и тип почвы, чтобы выбрать наиболее подходящий тип септика.
При покупке септика важно учитывать все технические параметры и особенности установки. Проведите сравнение различных вариантов и остановитесь на самом подходящем. Качественный септик — залог комфортного и беспроблемного проживания. Выбирая качественный септик, вы гарантируете длительный срок службы и удобство. Обратите внимание на услуги по доставке и установке, чтобы не столкнуться с неожиданными расходами.
Чтобы обеспечить свою безопасность и выполнение служебных обязанностей, я рекомендую [url=https://sluzbapokontrantu.ru/]заключи контракт с минобороны[/url].
До оформления соглашения стоит тщательно изучить все условия и особенности предлагаемого документа.
Основные этапы процесса заключения контракта включают сбор документов, согласование условий и подписание соглашения. Все эти шаги играет важную роль в обеспечении успешности и юридической чистоты сделки.
Необходимо помнить, что соблюдение всех правовых требований для минимизации рисков и предотвращения возможных споров. Следует также обратить внимание на проведение предварительной консультации с юристами, специализирующимися на военном праве.
После оформления всех формальностей — контракт считается заключенным, и можно приступать к выполнению условий соглашения. Правильное составление документов способствует успешной реализации проекта и защите интересов сторон.
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]как купить алкоголь с доставкой на дом[/url].
Торонто доставка алкоголя — это удобный способ купить алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
в крупных городах доставка алкоголя может быть осуществлена посредством специализированных компаний.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя позволяет экономить время и деньги по сравнению с покупкой алкоголя в магазине.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
В зависимости от региона и выбранного поставщика, заказчик может выбрать конкретную дату и время доставки.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
В некоторых случаях, доставка алкоголя может быть запрещена в конкретном регионе или государстве.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Некоторые методы оплаты могут не быть доступны для оплаты алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
Если у вас появились [url=https://www.netskolov.ru/]ремонт сколов краски на автомобиле[/url] невозможно оставить без внимания.
Устранение сколов на кузове — необходимая процедура для поддержания внешнего вида авто. Часто владельцы игнорируют мелкие повреждения, что может привести к серьезным последствиям в будущем. Главная цель — выполнить ремонт максимально аккуратно, чтобы не заметить ранее возникших повреждений.
Перед тем, как начать ремонт, необходимо определиться с методикой устранения повреждений. Выбор метода зависит от степени повреждения и места локализации скола, а также от желаемого уровня качества ремонта. Правильное выполнение ремонта — залог долговечности и эстетики восстановленных участков.
Когда работа завершена, проводят дополнительную проверку качества выполненных работ. Такая обработка предотвращает появление новых сколов и ухудшение внешнего вида кузова. Регулярное обслуживание и своевременные ремонты значительно продлевают жизнь кузову автомобиля.
Если вы решили купить забор из профнастила, воспользуйтесь нашим [url=https://www.dachniy-zabor-iz-profnastil.ru/]купить забор из профнастила[/url], чтобы рассчитать стоимость и подобрать лучший вариант.
Главным преимуществом профнастила является его надежность и разнообразие оттенков.
Также важно правильно рассчитать количество материала, чтобы избежать лишних трат.
Одно из главных преимуществ профнастила — его длительный срок службы без сложного обслуживания.
Это покрытие обеспечивает антикоррозийную защиту и стойкость к выцветанию.
[url=https://kontrol-braslety.ru/]бумажные браслеты с логотипом[/url] являются эффективным инструментом для контроля доступа и учета участников различных мероприятий.
Основное преимущество бумажных браслетов заключается состоит в их низкой стоимости доступности и возможностью массового производства массового изготовления. Их можно легко украсить оформить логотипами, номерами или дополнительной информацией, что повышает увеличивает их функциональность.
aviator mobil qeydiyyat [url=http://aviator09317.help/]aviator mobil qeydiyyat[/url]
[url=https://crforum.ru/viewtopic.php?t=24928]Поисковое продвижение сайта[/url] — какие метрики отслеживать в первую очередь?
Для надежной канализации на вашем участке рекомендуем [url=https://kupit-septik01.ru/]установка септика цена[/url] по выгодной цене и с гарантией качества.
Покупка септика — важный этап при строительстве частного дома. Прежде чем приобрести септик, необходимо ознакомиться с ассортиментом. Это поможет выбрать наиболее подходящую модель, учитывая ваши потребности. При выборе септика нужно учитывать качество материалов и производительность. Также стоит рассмотреть вопрос стоимости и гарантии на покупку.
Рекомендуется получить консультацию у специалистов или ознакомиться с отзывами о моделях. Это поможет избежать ошибок при выборе и сделать правильный выбор. Цена иногда обманчива — лучше выбрать проверенную модель, чтобы не пожалеть о приобретении. Обратите внимание на отзывы и рекомендации других покупателей, чтобы сделать правильный выбор. Учитывайте особенности участка и типа грунта, чтобы купить оптимальную модель.
Обязательно проверьте технические характеристики и удобство монтажа перед покупкой. Перед приобретением рекомендуется провести сравнение нескольких моделей и выбрать наиболее оптимальную. Выбор проверенного септика обеспечит чистую воду и комфортное использование канализации. Инвестиции в хорошее оборудование оправдают себя долгосрочной эксплуатацией и минимальными затратами на обслуживание. Узнайте заранее о вариантах доставки и монтажа, чтобы все прошло гладко.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота москва[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Благодаря опыту специалистов вы избежите потенциальных ошибок и лишних затрат.
Unlock incredible rewards today with [url=https://true-fortune-casino.uk/]true fortune casino no deposit bonus codes 2021[/url] and maximize your winning potential at True Fortune Casino!
Assistance is provided by experts who respond efficiently to inquiries.
Чтобы обеспечить свою безопасность и выполнение служебных обязанностей, я рекомендую [url=https://sluzbapokontrantu.ru/]заключи контракт с минобороны[/url].
Перед подписанием договора необходимо тщательно изучить все условия и особенности предлагаемого документа.
Основные этапы процесса заключения контракта включают сбор документов, согласование условий и подписание соглашения. Каждый из этих этапов играет важную роль в обеспечении успешности и юридической чистоты сделки.
Важно учитывать соблюдение всех правовых требований для минимизации рисков и предотвращения возможных споров. Следует также обратить внимание на проведение предварительной консультации с юристами, специализирующимися на военном праве.
После оформления всех формальностей — контракт считается заключенным, и можно приступать к выполнению условий соглашения. Правильное составление документов способствует успешной реализации проекта и защите интересов сторон.
[url=https://dostavkaalkogolyaplan.msk.ru/]алкоголь на дом[/url] — это удобный сервис для тех, кто ценит комфорт и оперативность.
Ваш надежный помощник: Доставка алкоголя на дом. В частности, услуга доставки алкоголя на дом становится все более востребованной. Это идеальное решение для тех, кто планирует вечеринку, спонтанно решил отметить событие или просто не хочет тратить время на поход в магазин. У нас вы найдете все: от крепких спиртных напитков до утонченных вин и разнообразного пива.
Наша главная задача – гарантировать удобство и быструю доставку. Благодаря нашей развитой логистической системе, вы можете быть уверены, что ваш заказ будет доставлен точно в срок. Круглосуточный режим работы позволяет наслаждаться напитками тогда, когда вам это удобно. Каждый курьер проходит тщательный отбор и обучение, что гарантирует высокий стандарт обслуживания.
Качество и многообразие выбора напитков. В нашем каталоге представлены алкогольные напитки различных категорий: от элитного коньяка и виски до легких коктейлей и сидров. Каждая позиция проходит строгий отбор, чтобы гарантировать безупречное качество и соответствие стандартам. Ассортимент регулярно пополняется новинками и эксклюзивными предложениями.
Мы понимаем, что каждый клиент имеет свои предпочтения, поэтому стараемся удовлетворить любые запросы. Наши опытные консультанты всегда готовы помочь с выбором, дать ценные рекомендации и подробно рассказать о каждом напитке. Мы ценим ваше доверие и делаем все возможное, чтобы процесс выбора был максимально приятным и информативным. Чтобы ваш стол был полностью укомплектован, вы можете заказать не только алкоголь, но и закуски, а также безалкогольные напитки.
Оформить заказ на доставку алкоголя очень просто. Доступны следующие способы заказа: через наш веб-сайт, мобильное приложение или по телефону. Благодаря интуитивно понятному интерфейсу, вы легко найдете нужный товар, добавите его в корзину и завершите покупку. Мы предлагаем удобные способы оплаты, включая онлайн-оплату и наличный расчет при получении заказа.
Служба доставки работает с высокой оперативностью. Ваш заказ будет доставлен в кратчайшие сроки после подтверждения, учитывая ваше местоположение. Мы гарантируем конфиденциальность и безопасность всех ваших данных. Для сохранения оптимальной температуры напитков, все заказы доставляются в специально разработанных термосумках.
Наша служба доставки алкоголя – это гарантия надежности, скорости и высокого качества. Мы понимаем, что быстрое и беспроблемное получение заказа является приоритетом. Поэтому мы непрерывно улучшаем наш сервис, внедряем новые технологии и обучаем сотрудников. Сотни довольных клиентов, которые доверяют нам свои вечера и торжества, формируют нашу репутацию.
Мы строго соблюдаем все законодательные нормы, касающиеся продажи и доставки алкоголя. Доставка производится исключительно совершеннолетним лицам при предъявлении документов, подтверждающих их возраст. Мы заботимся о вашей безопасности и соблюдаем все необходимые меры предосторожности. Доверьте нам заботу о напитках, и мы гарантируем ваше полное удовлетворение нашим сервисом.
aviator slot [url=aviator71803.help]aviator71803.help[/url]
888tarz [url=http://www.888starzuzs.com]https://888starzuzs.com/[/url] saytida qimor o‘yinlarining eng yangi va ishonchli versiyalarini topishingiz mumkin.
Sayt mijozlarga xizmat ko‘rsatish bo‘limi bilan tanilgan, ular har doim savollarga tezda javob beradi.
mostbet приложение скачать Кыргызстан [url=http://mostbet14967.help/]http://mostbet14967.help/[/url]
мелбет адрес зеркала [url=https://www.melbet67043.help]https://www.melbet67043.help[/url]
мостбет скачать 2026 [url=http://mostbet36014.help]http://mostbet36014.help[/url]
mostbet mines на деньги [url=https://mostbet47129.help]https://mostbet47129.help[/url]
Если у вас появились [url=https://www.netskolov.ru/]убираем сколы на капоте[/url] невозможно оставить без внимания.
Устранение сколов на кузове — необходимая процедура для поддержания внешнего вида авто. Многие водители недооценивают значимость своевременного ремонта, в то время как это способствует сохранению стоимости авто. Важно провести работу так, чтобы не было видно признаков ремонта и сохранить первоначальный внешний вид.
Подготовительный этап включает выбор подходящих материалов и инструментов для устранения сколов. В зависимости от размера и глубины повреждения используют различные технологии — от простого закраса до восстановления кузова с помощью специального оборудования. Правильное выполнение ремонта — залог долговечности и эстетики восстановленных участков.
Завершающий этап — финальный осмотр и шлифовка, чтобы сделать поверхность гладкой. Такая обработка предотвращает появление новых сколов и ухудшение внешнего вида кузова. Только правильное и своевременное восстановление позволит сохранить автомобиль в отличном состоянии на долгое время.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]бумажные браслеты брендированные[/url].
Бумажные браслеты как средство контроля активно внедряются в различных сферах.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Бумажные браслеты используются при организации больших событий и в медицинских учреждениях.
Практичность и легкость — основные преимущества данных изделий.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Область применения таких браслетов постоянно расширяется.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Бумажные браслеты для контроля продолжают завоевывать доверие благодаря своей универсальности и эффективности.
Эффективность этих изделий заключается в усилении контроля и безопасности.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
[url=https://kontrol-braslety.ru/]контрольные бумажные браслеты контрольные[/url] являются эффективным инструментом для контроля доступа и учета участников различных мероприятий.
Процесс изготовления производство таких браслетов довольно прост и не требует специальных навыков осуществляется быстро. Благодаря такому подходу это позволяет обеспечить гарантировать безопасность и контроль управление в разных ситуациях случаях.
探すの難しい、こんな優しく情報満載のブログ。ありがとう!。 [url=https://iqvel.com/ja/a/%E3%83%8B%E3%83%A5%E3%83%BC%E3%82%B8%E3%83%BC%E3%83%A9%E3%83%B3%E3%83%89/%E3%83%86%E3%82%AB%E3%83%9D%E6%B9%96%E3%81%AE%E3%83%AB%E3%83%94%E3%83%B3%E3%82%B9]湖畔の小径[/url] 持ち物リストまじ便利
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]доставка алкоголя ночью[/url].
Торонто доставка алкоголя — это удобный способ купить алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
Доставка алкоголя в городе может быть организована посредством автомобилей или курьерских служб.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя дает возможность заказывать алкогольные напитки прямо с работы или дома и доставлять их к выходным.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
В зависимости от региона и выбранного поставщика, заказчик может выбрать конкретную дату и время доставки.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
В некоторых случаях, доставка алкоголя может быть запрещена в конкретном регионе или государстве.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Некоторые методы оплаты могут не быть доступны для оплаты алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
Авторынок [url=http://auto-pmr.ru]Авторынок[/url] .
Для надежной канализации на вашем участке рекомендуем [url=https://kupit-septik01.ru/]септик с монтажом под ключ цена[/url] по выгодной цене и с гарантией качества.
Выбор септика — ключевой момент при планировании дачного участка. Перед тем как купить септик, стоит тщательно изучить рынок. Это поможет выбрать наиболее подходящую модель, учитывая ваши потребности. Требуется учитывать параметры изготовления и расчетный объем отходов. Также стоит рассмотреть вопрос стоимости и гарантии на покупку.
Перед покупкой септика рекомендуется проконсультироваться с специалистами или прочитать отзывы покупателей. Так вы сможете избежать ошибок при покупке и выбрать наиболее эффективный вариант. Не стоит экономить на качестве — лучше купить надежный септик, который прослужит долго. Обратите внимание на отзывы и рекомендации других покупателей, чтобы сделать правильный выбор. Также важно учитывать условия эксплуатации и тип почвы, чтобы выбрать наиболее подходящий тип септика.
При покупке септика важно учитывать все технические параметры и особенности установки. Перед приобретением рекомендуется провести сравнение нескольких моделей и выбрать наиболее оптимальную. Выбор проверенного септика обеспечит чистую воду и комфортное использование канализации. Выбирая качественный септик, вы гарантируете длительный срок службы и удобство. Не забудьте уточнить условия доставки и монтажа при покупке, чтобы избежать дополнительных затрат.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота цена недорого[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Отличной идеей будет обратиться к проверенным поставщикам, предлагающим готовые решения под ключ.
melbet login page [url=melbet58273.help]melbet login page[/url]
уличные камеры ip видеокамера камера уличная ночная
Чтобы обеспечить свою безопасность и выполнение служебных обязанностей, я рекомендую [url=https://sluzbapokontrantu.ru/]заключи контракт с минобороны[/url].
До оформления соглашения стоит тщательно изучить все условия и особенности предлагаемого документа.
Процесс подписания контракта состоит из сбор документов, согласование условий и подписание соглашения. Все эти шаги играет важную роль в обеспечении успешности и юридической чистоты сделки.
Важно учитывать соблюдение всех правовых требований для минимизации рисков и предотвращения возможных споров. Важным является проведение предварительной консультации с юристами, специализирующимися на военном праве.
После оформления всех формальностей — контракт считается заключенным, и можно приступать к выполнению условий соглашения. Тщательная подготовка документов способствует успешной реализации проекта и защите интересов сторон.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслет бумажный на руку[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Особенностями таких браслетов являются практичность и простота использования.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на свою простоту, они обеспечивают должный уровень контроля.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Расширение применения связано с необходимостью повышения уровня контроля и безопасности.
Популярность бумажных браслетов объясняется их многофункциональностью и простотой.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
plinko fish game [url=www.plinko62894.help]www.plinko62894.help[/url]
Если вы решили купить забор из профнастила, воспользуйтесь нашим [url=https://www.dachniy-zabor-iz-profnastil.ru/]стоимость метра забора из профлиста[/url], чтобы рассчитать стоимость и подобрать лучший вариант.
Быстрый монтаж позволит как можно скорее наслаждаться защищенным участком.
Точные размеры участка позволяют правильно подобрать необходимое количество профнастила.
Качественное полимерное покрытие продлевает срок эксплуатации и улучшает внешний вид.
Этот материал славится своей прочностью и устойчивостью к внешним воздействиям.
[url=https://kontrol-braslety.ru/]браслет бумажный контрольный на руку[/url] являются эффективным инструментом для контроля доступа и учета участников различных мероприятий.
Бумажные браслеты для контроля являются популярным инструментом считаются эффективным методом используют часто для проведения различных мероприятий. в сфере безопасности и организации организации событий. Они легко надеваются и снимаются легко устанавливаются и снимаются, что делает их удобными для использования в эксплуатации. Их можно легко украсить оформить логотипами, номерами или дополнительной информацией, что повышает увеличивает их функциональность.
starz 888 [url=www.888starz-kirish4.com/]starz 888[/url] .
888 starz login [url=http://888starz-uz3.com]http://888starz-uz3.com[/url] .
8888 bet [url=https://www.888starz-uz1.com]8888 bet[/url] .
888strz [url=http://888starz-oficialnyj-sajt5.com]888strz[/url] .
لعبة قمار [url=https://888starz-eg-egypt4.com/]https://888starz-eg-egypt4.com/[/url]
ستار مرهنات [url=https://www.eg888starz-bet.com]https://eg888starz-bet.com/[/url]
mines mostbet [url=http://mostbet81396.help]mines mostbet[/url]
aviator new games [url=aviator68130.help]aviator new games[/url]
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота купить[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Отличной идеей будет обратиться к проверенным поставщикам, предлагающим готовые решения под ключ.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]бумажные браслеты на заказ[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Эффективность и удобство делают их незаменимыми в различных областях.
Это делает их актуальными для организаций, заботящихся о контроле и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
В целом, бумажные браслеты остаются одним из самых удобных и доступных способов контроля на сегодняшний день.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Для надежной канализации на вашем участке рекомендуем [url=https://kupit-septik01.ru/]стоимость установки септика[/url] по выгодной цене и с гарантией качества.
Выбор септика — ключевой момент при планировании дачного участка. Перед тем как купить септик, стоит тщательно изучить рынок. Выбор зависит от объема отходов и особенностей участка. Очень важно обратить внимание на материал изготовления и производительность оборудования. Обязательно сравнивайте цены и условия гарантии у разнх производителей.
Рекомендуется получить консультацию у специалистов или ознакомиться с отзывами о моделях. Это снизит риск ошибок и поможет выбрать подходящее решение. Не стоит экономить на качестве — лучше купить надежный септик, который прослужит долго. Положительные отзывы и рекомендации — залог удачной покупки септика. Особенности почвы и условия эксплуатации существенно влияют на выбор септика.
Обязательно проверьте технические характеристики и удобство монтажа перед покупкой. Перед приобретением рекомендуется провести сравнение нескольких моделей и выбрать наиболее оптимальную. Выбор проверенного септика обеспечит чистую воду и комфортное использование канализации. Выбирая качественный септик, вы гарантируете длительный срок службы и удобство. Не забудьте уточнить условия доставки и монтажа при покупке, чтобы избежать дополнительных затрат.
hogyan aktiváljam a mostbet fiókomat [url=https://mostbet50472.help/]https://mostbet50472.help/[/url]
1win pariuri esports [url=https://1win15609.help/]https://1win15609.help/[/url]
Если вы ищете удобный способ получить [url=https://mskdostavkaalkogolya.msk.ru/]заказать алкоголь с доставкой москва[/url], то наш сервис поможет осуществить быструю и надежную доставку прямо к вашему порогу.
В будущем этот рынок будет развиваться и улучшаться, предлагая все новые возможности.
melbet apk кыргызстан [url=http://melbet87025.help]melbet apk кыргызстан[/url]
[url=https://dostavkaalkogolyaplan.msk.ru/]доставка алкоголя москва[/url] — это удобный сервис для тех, кто ценит комфорт и оперативность.
Доставка алкоголя: Комфорт и скорость в одном флаконе. В частности, услуга по доставке алкогольной продукции на дом приобретает все большую популярность. Это прекрасное решение для организации вечеринки, спонтанного празднования или экономии времени на посещение торговой точки. Наш ассортимент включает в себя богатый выбор напитков на любой вкус: от крепких до изысканных вин и разнообразных сортов пива.
Мы стремимся к максимальному комфорту и оперативности обслуживания. Благодаря нашей развитой логистической системе, вы можете быть уверены, что ваш заказ будет доставлен точно в срок. Круглосуточный режим работы позволяет наслаждаться напитками тогда, когда вам это удобно. Каждый курьер проходит тщательный отбор и обучение, что гарантирует высокий стандарт обслуживания.
Разнообразие и безупречное качество продукции. Наш каталог включает в себя широкий спектр алкоголя: от элитных коньяков и виски до легких коктейлей и сидров. Каждая позиция тщательно отбирается, чтобы гарантировать высочайшее качество и соответствие всем стандартам. Мы регулярно обновляем ассортимент, добавляя новинки и эксклюзивные предложения.
Мы осознаем уникальность предпочтений каждого клиента, поэтому стремимся удовлетворить любые запросы. Квалифицированные консультанты всегда готовы помочь с выбором, предоставить рекомендации и дать подробную информацию о любом напитке. Мы ценим ваше доверие и стремимся сделать процесс выбора максимально приятным и информативным. В дополнение к алкоголю, у нас можно заказать закуски и безалкогольные напитки, чтобы ваш стол был полностью укомплектован.
Оформить заказ на доставку алкоголя очень просто. Сделать это можно через наш интуитивно понятный веб-сайт, мобильное приложение или просто позвонив нам. Интуитивный интерфейс помогает быстро найти и добавить в корзину нужный товар, а затем оформить заказ. Мы предлагаем удобные способы оплаты, включая онлайн-оплату и наличный расчет при получении заказа.
Служба доставки работает с высокой оперативностью. После подтверждения, алкоголь будет доставлен максимально быстро, в зависимости от вашего местоположения. Мы обеспечиваем полную конфиденциальность и безопасность вашей информации. Для сохранения оптимальной температуры напитков, все заказы доставляются в специально разработанных термосумках.
Наши преимущества. Мы осознаем, насколько важно получить желаемое оперативно и без трудностей. Поэтому мы постоянно совершенствуем наш сервис, внедряем новые технологии и обучаем персонал. Наша репутация основана на сотнях довольных клиентов, доверяющих нам свои мероприятия.
Мы строго соблюдаем все законодательные нормы, касающиеся продажи и доставки алкоголя. Доставка производится исключительно совершеннолетним лицам при предъявлении документов, подтверждающих их возраст. Мы заботимся о вашей безопасности и следуем всем мерам предосторожности. Доверьте нам заботу о ваших напитках, и мы гарантируем, что вы останетесь довольны нашим сервисом.
Если вы планируете [url=https://sluzbapokontrantu.ru/]заключить контракт на сво 2026[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Сбор документов — первая и необходимая стадия оформления контракта, включая паспорт, военный билет и результаты медицинского осмотра.
Если у вас появились [url=https://www.netskolov.ru/]ремонт сколов и трещин[/url] невозможно оставить без внимания.
Исправление сколов на кузове — ключ к долговечности и красоты автомобиля. Несвоевременное устранение дефектов может ухудшить состояние кузова и снизить его прочность. Основная задача — быстро и качественно убрать дефект, чтобы восстановить целостность кузова.
Перед началом работ важно выбрать правильный метод устранения сколов. В зависимости от размера и глубины повреждения используют различные технологии — от простого закраса до восстановления кузова с помощью специального оборудования. Правильное выполнение ремонта — залог долговечности и эстетики восстановленных участков.
Когда работа завершена, проводят дополнительную проверку качества выполненных работ. Рекомендуется использовать специальные средства для защиты восстановленного участка от коррозии и грязи. Регулярное обслуживание и своевременные ремонты значительно продлевают жизнь кузову автомобиля.
[url=https://kontrol-braslety.ru/]контрольные браслеты на заказ[/url] являются эффективным инструментом для контроля доступа и учета участников различных мероприятий.
Бумажные браслеты для контроля используют не только на фестивалях концертах и вечеринках массовых мероприятиях, но и в некоторых случаях иногда в медицинских учреждениях для медосмотров или на спортивных соревнованиях для идентификации участников.
Вы хотите заказать алкоголь с доставкой на дом в Москве круглосуточно? Обратитесь на нашем сайте [url=https://dostavkaalkogolyaboka.msk.ru/]как купить алкоголь с доставкой на дом[/url].
доставка алкоголя — это быстро развивающаяся отрасль, которая позволяет заказывать алкогольные напитки прямо на дом.
Вот основные виды доставки алкоголя:
Доставка алкоголя в городе может быть организована посредством автомобилей или курьерских служб.
За некоторыми исключениями, доставка алкоголя обычно требует подтверждения возраста заказчиков и часто включает в себя проверку наличия удостоверения личности.
Доставка алкоголя дает возможность заказывать алкогольные напитки прямо с работы или дома и доставлять их к выходным.
Еще одно преимущество — возможность оставлять отзывы и оценивать сервис доставки, что помогает в выборе лучшего поставщика спиртного.
Этот сервис также может включать возможность бронирования доставки заранее, что может быть особенно полезно для больших заказов или праздников.
Часть поставщиков предоставляет возможность приценивать стоимость доставки до передачи заказа.
После регистрации и оформления заказа, поставщик Spiritt delivers и другие партнеры направляют работников в местную площадь для получения заказа и пересылке в нужное время.
Клиенты могут получить доступ к информации о статусе заказа, а также отслеживать местоположение курьера на все время движения.
При выборе сервиса доставки алкоголя нужно обязательно уделять внимание качеству предоставляемых напитков и условиям транспортировки.
Есть ряд ограничений, связанных с доставкой алкоголя, например:
Некоторые методы оплаты могут не быть доступны для оплаты алкоголя.
Следовательно, перед тем как заказать доставку алкоголя, необходимо ознакомиться с местными законами и правилами, касающимися оплаты, доставки и потребления алкоголя.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]заказать бумажные браслеты[/url].
Бумажные браслеты как средство контроля активно внедряются в различных сферах.
Такие браслеты обеспечивают контроль за состоянием и помогают повысить безопасность.
Эти устройства широко применяются на массовых мероприятиях, а также в сферах здравоохранения.
Практичность и легкость — основные преимущества данных изделий.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Несмотря на свою простоту, они обеспечивают должный уровень контроля.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Область применения таких браслетов постоянно расширяется.
Это делает их актуальными для организаций, заботящихся о контроле и безопасности.
Популярность бумажных браслетов объясняется их многофункциональностью и простотой.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
mostbet как скачать [url=http://mostbet23586.help]http://mostbet23586.help[/url]
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Для тех, кто ищет надежное решение для входа в дворе, покупка откатных ворот с установкой является отличным выбором.
Можно ли комбинировать абонентскую плату и [url=https://prodvizhenie-sajta-s-oplatoj-za-rezultat.ru]продвижение сайта с оплатой за результат[/url]?
Если вы планируете [url=https://sluzbapokontrantu.ru/]служба по контракту[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Кандидату предстоит внимательно изучить свои обязательства и потенциальную опасность, присущую службе в СВО.
плинко слоты [url=plinko83214.help]plinko83214.help[/url]
pin-up free spins condiciones [url=pinup84291.help]pinup84291.help[/url]
свежие объявления авторынок [url=www.bravely-breezy-viola.tilda.ws/tdocs/rinok-chetireh-koles-kak-prodayut-i-pokupayut-avtomobili-v-pridnestrove-ry1cvvtm7k6s8kc]свежие объявления авторынок[/url] .
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]бумажные браслеты с логотипом на заказ[/url].
Бумажные браслеты как средство контроля активно внедряются в различных сферах.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Главные плюсы бумажных браслетов — их простота и легкость.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Бумажные браслеты для контроля продолжают завоевывать доверие благодаря своей универсальности и эффективности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]производство столешниц из искусственного камня[/url] — прочный, стильный и практичный выбор.
Эти столешницы выделяются высокой износостойкостью и долгим сроком службы.
—
Главное преимущество этого материала – стойкость к механическим воздействиям.
—
Необходимо избегать продолжительного контакта с горячими предметами.
—
Это инвестиция в комфорт и дизайн вашего дома.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]серьги с бриллиантами[/url].
Эти серьги способствуют созданию стильного и выразительного образа.
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасный дом под ключ[/url], где качество сочетается с доступностью.
Каркасные дома ценятся за их быструю сборку и низкий вес конструкции.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]ворота откатные под ключ цена[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Перед покупкой важно учитывать характеристики ворот, такие как прочность, материал и механизмы открытия.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]серьги из красного золота с бриллиантами[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Серьги с бриллиантами всегда считались символом роскоши и элегантности.
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]современные модульные диваны[/url], идеальное сочетание комфорта и стиля.
Модульный диван позволяет реализовать разные стили — от минимализма до уютных мягких форм.
pinup jonli diler [url=pinup50413.help]pinup50413.help[/url]
Петушиное агентство Panda SMM [url=https://pandasmm.ru]Петушиное агентство Panda SMM[/url]
https://t.me/Asiapsi
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]бумажные браслеты[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Эти устройства широко применяются на массовых мероприятиях, а также в сферах здравоохранения.
Особенностями таких браслетов являются практичность и простота использования.
Легкость их ношения и снятия — важный фактор, который делает их популярными.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Дизайн этих браслетов может варьироваться, что позволяет адаптировать их под конкретные нужды.
Эффективность и удобство делают их незаменимыми в различных областях.
Расширение применения связано с необходимостью повышения уровня контроля и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Если вы планируете [url=https://sluzbapokontrantu.ru/]служба по контракту[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Это обеспечивает осознанный выбор и подготовку к службе в условиях повышенной ответственности.
pin-up sayt təhlükəsizdir [url=https://pinup56439.help/]https://pinup56439.help/[/url]
1win slotlar [url=www.1win25674.help]www.1win25674.help[/url]
mines oyini mostbet [url=http://mostbet20439.help]http://mostbet20439.help[/url]
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]контрольные браслеты на заказ[/url].
Бумажные браслеты для контроля становятся все более популярными в современном мире.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Бумажные браслеты используются при организации больших событий и в медицинских учреждениях.
Особенностями таких браслетов являются практичность и простота использования.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Эффективность этих изделий заключается в усилении контроля и безопасности.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Отличной идеей будет обратиться к проверенным поставщикам, предлагающим готовые решения под ключ.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]изготовление столешницы из искусственного камня[/url] — прочный, стильный и практичный выбор.
Благодаря этому, столешницы из искусственного камня подходят для любых стилей помещений.
—
Ключевой плюс искусственного камня – высокая сопротивляемость повреждениям.
—
Нельзя применять абразивные или агрессивные моющие средства.
—
Такая универсальность позволяет использовать их в любых комнатах.
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]модульные диваны[/url], идеальное сочетание комфорта и стиля.
Не менее важно оценить наполнитель сидений и уровень упругости подушек.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]бриллиантовые серьги гвоздики[/url].
Серьги могут быть как классическими, так и современными, минималистичными или вычурными.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]серьги дорожки с бриллиантами[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
При покупке серьг с бриллиантами важно учитывать качество и характеристики камней.
mostbet пополнение visa [url=http://mostbet43287.help]mostbet пополнение visa[/url]
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасные дома спб[/url], где качество сочетается с доступностью.
Современные материалы дают возможность строить каркасные дома круглогодично.
1win турнир [url=https://www.1win38596.help]https://www.1win38596.help[/url]
1win depozit bonusi Oʻzbekiston [url=https://1win85063.help/]https://1win85063.help/[/url]
Si sigues buscas una alternativa original, alojarte en domos es una solucion que ha alcanzado bastante fama en este periodo. Ya sea un hospedaje burbuja en esta comunidad, esta comarca o la capital, estas cupulas brindan una manera especial de conectar con la paz natural sin sacrificar a las ventajas. Hay variantes que van desde domos estrella polar en esta zona hasta bubble hotel en el noreste peninsular o del mismo modo burbujas en los alrededores de Madrid, ideales para una experiencia de fin de semana.
Para turistas que quieren visitar otras propuestas, hay tambien refugios burbuja en sitios como esta provincia, el sur andaluz o el entorno de Ronda, y sitio de acampada burbuja en multiples enclaves de nuestro pais. Si te interesa ver presupuestos o opciones disponibles, te invito a explorar [url=https://hotelesburbuja.org]bubble hotel catalunya[/url] , donde podras ver datos de ultima hora y valoraciones de aventureros. La gama es enorme y sin duda daras con el espacio en burbujas que mas se acomode a tu aventura.
Si te encuentras considerando una aventura especial para estas vacaciones perfectas, el alojamiento en esferas transparentes es una idea que con el tiempo obtiene mas popularidad. Desde descanso burbuja Andalucia hasta destinos en burbuja Cataluna o bubble hotel en Madrid, estas noches presentan una manera especial de reconectar con la tierra sin sacrificar a la comodidad total. Por caso, en burbuja Estrella Polar Murcia o burbujas granada consigues vivir de noches especiales bajo las estrellas infinitas con completa privacidad y calma y comodidad total.
Para los que prefieren opciones mas urbanos y accesibles, las burbujas cerca de Madrid o burbuja Malaga son una estupenda opcion para escapadas de fin de semana rapidas. Ademas hay destinos diversas como cabanas burbuja Cataluna o camping burbuja Alicante, amoldandose a multiples perfiles y presupuestos variados. Si te interesa explorar mas recursos y costes sobre los refugios en burbujas de diseno, te invito a consultar a este sitio [url=https://hotelburbujaespana.org]bubble hotel catalunya[/url] , donde hallaras datos actualizada y orientaciones concretas.
Если вы планируете [url=https://sluzbapokontrantu.ru/]заключить контракт на СВО[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Если документы заполнены неправильно или отсутствуют, это может привести к задержке в заключении контракта.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслеты контрольные брендированные[/url].
Бумажные браслеты для контроля становятся все более популярными в современном мире.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Бумажные браслеты используются при организации больших событий и в медицинских учреждениях.
Особенностями таких браслетов являются практичность и простота использования.
Легкость их ношения и снятия — важный фактор, который делает их популярными.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Область применения таких браслетов постоянно расширяется.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Популярность бумажных браслетов объясняется их многофункциональностью и простотой.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
При выборе средств контроля большинству специалистов рекомендуется отдавать предпочтение газетным браслетам благодаря их функциональности.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]изготовить столешницу из искусственного камня[/url] — прочный, стильный и практичный выбор.
Для создания искусственного камня используют синтетические полимеры в сочетании с минеральными материалами.
—
Одним из основных достоинств искусственного камня является его устойчивость к повреждениям.
—
Чаще всего достаточно обычного протирания влажной мягкой тканью.
—
Этот материал отличается красотой и надежностью в эксплуатации.
dentist website development [url=https://website-for-dentistry.com]dentist website development[/url]
true fortune casino free [url=www.true-fortune-casino-gb.com]true fortune casino free[/url] .
true fortune ca promotion [url=www.truefortunecasino-freespins.com/]www.truefortunecasino-freespins.com/[/url] .
how true are fortune cookies [url=www.truefortunecasino-bonus.com]how true are fortune cookies[/url] .
true fortune casino no deposit [url=https://truefortune-promo-code.com/]true fortune casino no deposit[/url] .
true fortune ca promotion [url=http://true-fortunecasino.uk/]http://true-fortunecasino.uk/[/url] .
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]купить модульный диван в москве[/url], идеальное сочетание комфорта и стиля.
Наличие металлических креплений и крепкого деревянного бруса повышает срок службы конструкции.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]установка откатных ворот под ключ московская область[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Перед покупкой важно учитывать характеристики ворот, такие как прочность, материал и механизмы открытия.
aviator android [url=http://aviator50639.help/]aviator android[/url]
[url=https://crforum.ru/viewtopic.php?t=24929]Создание сайтов[/url] для B2B — на что обратить особое внимание?
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]серьги с бриллиантами огранки груша[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Во-первых, необходимо оценить чистоту и огранку камней.
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасные дома в спб[/url], где качество сочетается с доступностью.
Каркасный дом – это популярное решение для комфортного и быстрого жилья.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]печать бумажных браслетов[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Благодаря своей простоте такие браслеты удобно крепить и снимать.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Дизайн этих браслетов может варьироваться, что позволяет адаптировать их под конкретные нужды.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
При выборе средств контроля большинству специалистов рекомендуется отдавать предпочтение газетным браслетам благодаря их функциональности.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]столешница из искусственного камня цена[/url] — прочный, стильный и практичный выбор.
Современные интерьеры всё чаще украшают столешницами из искусственного камня.
—
В случае мелких дефектов можно легко обновить внешний вид столешницы.
—
Забота о таких столешницах несложна и не требует профессиональных чистящих средств.
—
Благодаря своим качествам, они подходят для любого интерьера.
1win lucky jet tournament [url=http://1win08952.help/]1win lucky jet tournament[/url]
1win комиссия элсом [url=http://1win43867.help]1win комиссия элсом[/url]
1win android necə yükləmək olar [url=https://www.1win25674.help]1win android necə yükləmək olar[/url]
mostbet букмекерская контора Кыргызстан [url=https://mostbet97142.help/]https://mostbet97142.help/[/url]
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]диван модульный дизайнерский[/url], идеальное сочетание комфорта и стиля.
При выборе материалов учитывают износостойкость и простоту ухода: распространены плотные ткани, экокожа и велюр.
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота под ключ[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Если вы хотите обеспечить безопасность и комфорт, то приобретение откатных ворот с монтажом — это именно то, что вам нужно.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]серьги с бриллиантом[/url].
Сегодня серьги с бриллиантами предпочитают носить на торжественных мероприятиях и праздниках.
продвижение сайта в поисковых системах [url=https://prodvizhenie-sajta-v-poiskovyh-sistemah.ru]продвижение сайта в поисковых системах[/url] .
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасный дом цена[/url], где качество сочетается с доступностью.
Главное преимущество таких домов – их лёгкость и скорость возведения.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]сколько стоят серьги с бриллиантами[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Необходимо избегать попадания на серьги с бриллиантами различных химических веществ.
Если вы планируете [url=https://sluzbapokontrantu.ru/]записаться на контракт на сво[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
В итоге, подписание контракта на участие в СВО — это комплексный процесс, основанный на соблюдении ряда формальностей.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]изготовление контрольных браслетов[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Легкость их ношения и снятия — важный фактор, который делает их популярными.
Хоть эти браслеты кажутся простыми, они отличаются высокой надежностью.
Дизайн этих браслетов может варьироваться, что позволяет адаптировать их под конкретные нужды.
Область применения таких браслетов постоянно расширяется.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Бумажные браслеты для контроля продолжают завоевывать доверие благодаря своей универсальности и эффективности.
Эффективность этих изделий заключается в усилении контроля и безопасности.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Si vas buscas una alternativa especial, el sitio burbuja en varias localidades de tierras espanolas como Andalucia y sus pueblos, el noreste espanol o la zona de Madrid es una opcion cada vez mas valorada. Estas alojamientos burbuja o capsulas burbuja ofrecen una via singular de estar en contacto con la tierra sin prescindir a las servicios, perfectas para fugas especiales o para evadirse del agotamiento de la ciudad.
En localizaciones como burbuja estrella Murcia, burbuja hotel en tierras alicantinas o burbujas en los alrededores de la Comunidad de Madrid, podras ver modalidades que se adecuan a tu presupuesto, ya sea un capsula en camping o una burbuja de lujo con panoramas impresionantes. Para descubrir numerosas opciones y costos, te sugiero explorar [url=https://hotelburbujaespana.top]burbujas alicante[/url] , donde podras ver informacion al dia y analisis de las principales burbujas en cada rincon de Espana.
русификация geely monjaro [url=www.russification.ru/]www.russification.ru/[/url] .
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]бриллиантовые серьги гвоздики[/url].
Благодаря этому камни ярко играют светом, создавая неповторимые переливы.
как скачать mostbet на iphone [url=https://www.mostbet60398.help]как скачать mostbet на iphone[/url]
1win написать в поддержку [url=https://1win41738.help/]https://1win41738.help/[/url]
mostbet разрешить установку apk [url=https://www.mostbet93268.help]mostbet разрешить установку apk[/url]
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]установка откатных ворот под ключ московская область[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
В современном дворе установленные откатные ворота с профессиональной установкой создают уют и защищают ваш участок.
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]диван модульный дизайнерский[/url], идеальное сочетание комфорта и стиля.
Это дает возможность собрать неповторимую конфигурацию, подходящую к интерьеру.
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасные дома в спб[/url], где качество сочетается с доступностью.
Кроме того, стоимость каркасного дома обычно ниже, чем у традиционных кирпичных построек.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]бумажные браслеты на заказ[/url].
Бумажные браслеты как средство контроля активно внедряются в различных сферах.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Главные плюсы бумажных браслетов — их простота и легкость.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Эффективность и удобство делают их незаменимыми в различных областях.
Это делает их актуальными для организаций, заботящихся о контроле и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Эффективность этих изделий заключается в усилении контроля и безопасности.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]купить серьги дорожка с бриллиантами[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Многие современные украшения комбинируют традиционные материалы с инновационными решениями в дизайне.
Если вы планируете [url=https://sluzbapokontrantu.ru/]контракт на сво условия[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Оформление контракта на службу в рамках специальных военных операций (СВО) представляет собой важный шаг, сопровождаемый множеством нюансов.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]серьги с бриллиантом[/url].
Чистка и правильное хранение обеспечивают долгий срок службы украшений.
1win plinko strategie [url=http://1win5755.help/]1win plinko strategie[/url]
мостбет рақами телефон [url=http://mostbet13748.help/]http://mostbet13748.help/[/url]
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслет бумажный на руку[/url].
Бумажные браслеты для контроля становятся все более популярными в современном мире.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Это делает их актуальными для организаций, заботящихся о контроле и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Использование таких браслетов способствует повышению уровня безопасности и контроля за объектами или участниками.
В целом, бумажные браслеты остаются одним из самых удобных и доступных способов контроля на сегодняшний день.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
crash गेम aviator [url=http://aviator63791.help/]http://aviator63791.help/[/url]
true fortune casino no deposit bonus code [url=www.true-fortune-bonus.com]true fortune casino no deposit bonus code[/url] .
no deposit true fortune casino [url=http://true-fortune-gb.com]http://true-fortune-gb.com[/url] .
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота недорого с установкой[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Профессиональная установка гарантирует долгий срок службы конструкций и их надежную работу.
mostbet Fălești [url=https://mostbet63247.help/]https://mostbet63247.help/[/url]
true fortune casino casino app [url=www.true-fortune-casino3.com/]true fortune casino casino app[/url] .
true fortune casino promo codes [url=http://true-fortune-casino5.com/]true fortune casino promo codes[/url] .
true fortune casino free chip 2026 [url=true-fortune-casino4.com]true-fortune-casino4.com[/url] .
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]модульные диваны от производителя[/url], идеальное сочетание комфорта и стиля.
Сборка и переезд становятся проще благодаря тому, что диван состоит из отдельных, легких частей.
mostbet bonus şərtləri [url=https://mostbet63875.help]https://mostbet63875.help[/url]
true fortune no deposit bonus [url=http://true-fortune-unitedkingdom.com/]true fortune no deposit bonus[/url] .
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасные дома под ключ в спб цены[/url], где качество сочетается с доступностью.
Каркасное строительство зачастую обходится дешевле по сравнению с традиционными методами.
Если вы планируете [url=https://sluzbapokontrantu.ru/]заключи контракт с минобороны[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Финальной стадией считается подписание договора и оформление военного статуса.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]серьга с бриллиантом в одно ухо[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Украшения с бриллиантами, в частности серьги, давно ассоциируются с изысканностью и статусом.
true fortune casino home [url=http://truefortunecasinos.uk]http://truefortunecasinos.uk[/url] .
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]столешницы из искусственного камня недорого[/url] — прочный, стильный и практичный выбор.
Такой материал объединяет природную красоту и технические преимущества.
—
Повреждения небольшого масштаба легко устраняются путем реставрации.
—
Абразивные и агрессивные чистящие средства использовать не рекомендуется.
—
Они сочетают в себе привлекательный внешний вид и высокие эксплуатационные характеристики.
no deposit codes for true fortune casino 2026 [url=http://www.true-fortune-freespins.com]no deposit codes for true fortune casino 2026[/url] .
jpz7my
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]сколько стоят серьги с бриллиантами[/url].
Благодаря этому камни ярко играют светом, создавая неповторимые переливы.
мелбет aviator на деньги [url=https://www.melbet41673.help]https://www.melbet41673.help[/url]
мостбет правила пополнения [url=https://mostbet64071.help/]https://mostbet64071.help/[/url]
1win shaxsiy kabinet depozit [url=https://www.1win16583.help]https://www.1win16583.help[/url]
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслеты бумажные заказать[/url].
Бумажные браслеты для контроля становятся все более популярными в современном мире.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Главные плюсы бумажных браслетов — их простота и легкость.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Сфера использования бумажных браслетов увеличивается с каждым годом.
Расширение применения связано с необходимостью повышения уровня контроля и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Si te encuentras buscaste deportes en el agua en el puerto de Colon Tenerife, rentar jetskis es una excelente manera para explorar la linea de playa y sentir del agua de estilo divertida y emocionante. En el sur de la isla, especialmente en puntos como el area de Costa Adeje, ofrecen desde alquileres individuales hasta tours en moto de agua que van dirigidas a todo tipo de niveles.
Para las personas que quieren consultar precios y opciones, propongo revisar opciones de companias que proporcionan tours y alquiler en motos marinas en Tenerife, incluyendo tambien actividades como rutas safari o alquiler de jet skis en Santa Cruz de Tenerife. Mas detalles y detalles sobre precios y rutas podras ver en este enlace: [url=https://motoaguatenerife.top]alquiler de motos de agua en tenerife precios[/url] . ?Estupendo para disfrutar de un dia especial y vivir del mar canario!
true fortune 50 free spins promo code [url=http://truefortune-50-free-spins.com]true fortune 50 free spins promo code[/url] .
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота цена под ключ недорого[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
В современном дворе установленные откатные ворота с профессиональной установкой создают уют и защищают ваш участок.
Если вы планируете [url=https://sluzbapokontrantu.ru/]военная служба по контракту[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
Подписание контракта открывает путь к дальнейшему обучению и выполнению задач в рамках СВО.
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]дизайнерская модульная мебель[/url], идеальное сочетание комфорта и стиля.
Конструкция из модулей облегчает транспортировку и монтаж благодаря легким секциям.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]столешница из искусственного камня цена[/url] — прочный, стильный и практичный выбор.
Эти столешницы выделяются высокой износостойкостью и долгим сроком службы.
—
Важным преимуществом считается возможность ремонтов и обновления внешнего вида.
—
Забота о таких столешницах несложна и не требует профессиональных чистящих средств.
—
Такая универсальность позволяет использовать их в любых комнатах.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]красивые серьги с бриллиантами[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Современные дизайнеры добавляют к классике яркие детали и необычные формы.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслеты бумажные контрольные купить[/url].
Бумажные браслеты как средство контроля активно внедряются в различных сферах.
Использование бумажных браслетов значительно улучшает контроль и мониторинг.
Эти устройства широко применяются на массовых мероприятиях, а также в сферах здравоохранения.
Главные плюсы бумажных браслетов — их простота и легкость.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на свою простоту, они обеспечивают должный уровень контроля.
Их внешний вид и структура легко приспосабливаются к различным задачам и стилям.
Эффективность и удобство делают их незаменимыми в различных областях.
Такая универсальность особенно ценится в организациях, нуждающихся в контроле.
Бумажные браслеты для контроля продолжают завоевывать доверие благодаря своей универсальности и эффективности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Подводя итог, можно сказать, что бумажные браслеты — это выгодное решение для контроля.
Желающие повысить уровень безопасности и контроля выбирают именно такие изделия — они сочетают простоту, надежность и доступность.
melbet Корти миллӣ барориш [url=https://melbet82460.help]melbet Корти миллӣ барориш[/url]
aviator lucky jet rəsmi [url=https://www.aviator57204.help]https://www.aviator57204.help[/url]
crazy time stast [url=http://crazy-time6.com/stats/]https://crazy-time6.com/stats/[/url]
aviator apostas com pix [url=https://aviator46035.help/]https://aviator46035.help/[/url]
Хотите повысить безопасность и эстетику своего участка? [url=https://www.vorota-otkatnyye-pod-klyuch.ru/]откатные ворота под ключ московская область[/url] — профессиональные откатные ворота с монтажом по индивидуальному проекту!
Монтаж откатных ворот — это залог их правильной работы и безопасности вашим близким.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]золотые серьги пусеты с бриллиантами[/url].
Следует избегать жестких механических воздействий на камни и металл.
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]столешницы из искусственного камня[/url] — прочный, стильный и практичный выбор.
Современные интерьеры всё чаще украшают столешницами из искусственного камня.
—
Их поверхности устойчивы к царапинам и не подвержены сколам.
—
Использование абразивных или агрессивных средств нежелательно.
—
Решившись на искусственный камень, вы выбираете долговечность, эстетику и легкий уход.
Как внутренняя перелинковка помогает [url=https://dimitrov.forum24.ru/?1-18-0-00003928-000-0-0-1776878352]Продвижение сайтов[/url]?
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]каркасный дом[/url], где качество сочетается с доступностью.
Также каркасные дома часто дешевле кирпичных аналогов, что делает их более доступными.
Если вы планируете [url=https://sluzbapokontrantu.ru/]служба по контракту на сво[/url], ознакомьтесь с основными условиями и преимуществами такой службы.
После этого можно приступать к прохождению соответствующей подготовки и выполнению служебных обязанностей.
Преобразите ваш интерьер с помощью [url=https://www.divan-iz-moduley.ru/]современные модульные диваны[/url], идеальное сочетание комфорта и стиля.
При выборе дивана из модулей важно оценить качество каркаса и механизмов соединения.
Выберите идеальное украшение своего образа среди [url=https://www.radiance-earrings.ru/]якутские бриллианты купить серьги[/url], чтобы подчеркнуть свою индивидуальность и элегантность.
Рекомендуется избегать контакта с агрессивными химическими средствами.
Бумажные браслеты для контроля обеспечивают надежную и удобную фиксацию посетителей на мероприятиях, подтверждая их участие [url=https://kontrol-braslet.ru/]браслет вкп[/url].
Использование бумажных браслетов для мониторинга устройств приобретает всё большую популярность.
Они позволяют отслеживать различные параметры и обеспечивают высокий уровень безопасности.
Наиболее часто такие браслеты применяются при проведении массовых мероприятий и в медицине.
Практичность и легкость — основные преимущества данных изделий.
Они легко надеваются и снимаются, что делает их весьма удобными в использовании.
Несмотря на кажущуюся простоту, бумажные браслеты обладают высокой степенью надежности.
Материалы и дизайн можно менять в зависимости от требований, что делает их универсальными.
Эффективность и удобство делают их незаменимыми в различных областях.
Это делает их актуальными для организаций, заботящихся о контроле и безопасности.
Доверие к этим устройствам растет благодаря их практичности и доступности.
Они значительно улучшают процессы мониторинга и контроля ситуации.
Можно смело утверждать, что такие браслеты — один из лучших вариантов контроля в современном мире.
Все больше организаций предпочитают бумажные браслеты для контроля из-за их удобства и эффективности.
Изысканный подарок для особенного случая — [url=https://www.diamonds-earrings.ru/]бриллиантовые серьги цена[/url].
В современном мире серьги с бриллиантами являются популярным выбором для особых случаев.
mostbet турниры казино [url=http://mostbet07541.help]http://mostbet07541.help[/url]
Если вы ищете надежное решение для вашей кухни, рекомендуем обратить внимание на [url=https://www.stoleshnica-na-zakaz.ru/]столешница из искусственного камня[/url] — прочный, стильный и практичный выбор.
В результате такой материал универсален для оформления интерьеров в разных стилях.
—
Поглощение влаги отсутствует, облегчая уход за поверхностью.
—
Хотя искусственный камень обладает термостойкостью, сильный и резкий нагрев может повредить поверхность.
—
Это делает их универсальными для различных помещений.
demo crazy time [url=https://crazy-time-italy.it/]https://crazy-time-italy.it/[/url]
Если вы мечтаете о надежном и уютном жилье, обратите внимание на [url=https://karkasnye-doma08.ru]дом каркасный под ключ[/url], где качество сочетается с доступностью.
Каркасные дома сегодня завоевывают всё большую популярность среди желающих построить собственное жильё.
bonus benvenuto crazy time [url=https://www.crazy-time8.com]https://crazy-time8.com/[/url]
sisal crazy time italia [url=https://crazy-time-ita.com/]sisal crazy time italia[/url].
live crazy time a [url=https://www.crazy-time-slot.it]https://crazy-time-slot.it/[/url]
Если вы ищете [url=https://gotovye-proekty-domov18.ru]готовый проект дома с чертежами[/url], то у нас вы обязательно найдете идеальный вариант для строительства вашего уютного дома.
Благодаря этому можно сразу получить максимально комфортное и функциональное жильё.
Вы ищете надежное решение для своего будущего жилья? Рассмотрите [url=https://karkasnye-doma-pod-klyuch10.ru]строительство каркасных домов спб[/url], чтобы получить качественный и современный дом по доступной цене.
Сегодня всё больше людей выбирают каркасные дома как оптимальный вариант жилья. Они отличаются быстрым строительством и высокой энергоэффективностью. В этом материале мы подробно рассмотрим особенности такой конструкции, преимущества и особенности эксплуатации.
Основой каркасного дома является каркас, выполненный из деревянных или металлических элементов. Облицовка и утепление этого каркаса выполняются отдельно, что обеспечивает отличную теплоизоляцию и сокращает время строительства. Такой тип дома идеально подходит для тех, кто ищет быстрое решение для жилья.
Главное преимущество каркасных домов — это их быстрота возведения. Обычно такие дома возводятся за несколько недель, что значительно экономит время и денежные ресурсы. Кроме того, каркасные дома легки и требуют меньших затрат при транспортировке и монтаже.
Эксплуатационные характеристики каркасных домов позволяют им долго служить без существенного ремонта. Они хорошо сохраняют тепло и не подвержены гниению, что делает их выгодным вариантом для комфортного проживания. Правильное утепление и вентиляция обеспечивают комфорт в любое время года.
Подводя итог, можно сказать, что такие дома идеально подходят для тех, кто ищет сочетание скорости, качества и стоимости. Такие строения пользуются популярностью благодаря своим уникальным характеристикам и возможностям адаптации под любые потребности владельцев.
Ищете надежную [url=https://arenda-avto-s-voditelem054.ru/]аренду автомобиля с водителем новосибирск[/url], чтобы удобно и комфортно добраться по городу или за его пределы.
Использование услуги также избавляет от необходимости искать место для парковки и анализировать маршруты.
Лучшее решение для тех, кто ищет [url=https://proekty-domov7.ru]каталог проектов домов[/url], — это широкий выбор качественных и эффективных решений.
Готовые проекты домов – это отличное решение для тех, кто ценит свое время и хочет уменьшить расходы.
Для скачивания любимых приложений для андроид посетите [url=https://prilozheniya-dlya-android01.ru/]приложения для android[/url].
В магазине представлены тысячи приложений, доступных для скачивания.
В случае аварийного вскрытия замков [url=https://zamok-key.ru/]служба по вскрытию замков дверей спб[/url], наши квалифицированные мастера быстро и без повреждений откроют любую дверь в Санкт-Петербурге.
Время от времени владельцы сталкиваются с ситуациями, требующими срочного вскрытия замков, и именно в таких случаях помогает аварийное вскрытие.
Главной задачей таких специалистов является быстрое и безопасное вскрытие замка без повреждений .
Обычно проводится предварительный осмотр, после которого выбирается оптимальный способ вскрытия .
Используются различные инструменты, такие как отмычки, гидравлические ножницы или электрошокеры, в зависимости от сложности замка .
Поэтому в критических ситуациях необходимо обращаться к опытным профессионалам, чтобы избежать ненужных проблем.
В зависимости от типа замка выбирается метод вскрытия, чтобы минимизировать риск повреждения .
Быстрая реакция и точность — ключевые качества специалистов по аварийному вскрытию .
Обращение к опытным специалистам позволяет решить проблему максимально оперативно и без повреждений.
Как [url=https://prodvizhenie-sajta-v-poiskovyh-sistemah.ru]продвижение сайта в поисковых системах[/url] соотносится с продвижением в соцсетях?
Вы можете оформить [url=https://worldalcodostavka.msk.ru/]доставка алкоголя ночью[/url], чтобы получить его быстро и удобно прямо к вашему порогу.
Современные службы доставки алкоголя набирают всё большую популярность и обеспечивают комфорт и оперативность.
В большинстве городов развились сервисы, которые позволяют купить алкоголь онлайн и получить его дома и указать удобное время и место доставки.
Процесс очень прост — достаточно выбрать напиток, указать адрес и оплатить заказ.
Доставка алкоголя осуществляется быстро, зачастую в течение часа или двух.
На доставке требуется предъявить документ, подтверждающий совершеннолетие клиента.
Оформляя первый заказ, можно воспользоваться различными бонусами и специальными предложениями.
Общая картина показывает, что услуги по доставке алкоголя значительно упрощают жизни современных людей.
Ищете надежную [url=https://arenda-avto-s-voditelem054.ru/]аренду водителя с автомобилем[/url], чтобы удобно и комфортно добраться по городу или за его пределы.
Основные плюсы включают возможность сосредоточиться на важных делах без забот о дороге и парковке.
Для скачивания любимых приложений для андроид посетите [url=https://prilozheniya-dlya-android01.ru/]магазин приложений андроид[/url].
Для загрузки программ обычно требуется авторизация или учетная запись, что обеспечивает безопасность пользователей.
Совершите выгодную покупку: [url=https://alcodostavkawww.msk.ru/]доставка алкоголя в москве круглосуточно на дом[/url].
Услуги по доставке спиртных напитков набирают обороты среди покупателей. На рынке появляется всё больше компаний, предлагающих доставку алкоголя прямо к вашему порогу. В нынешних условиях доставка алкоголя стала одним из самых популярных способов приобрести напитки.
Чтобы сделать заказ, нужно определиться с сервисом, который будет его осуществлять. Интернет-ресурсы предоставляют подробное описание ассортимента и условия доставки. Важно учитывать отзывы других клиентов и репутацию компании.
Процесс заказа обычно занимает несколько минут. Следующий шаг — подтвердить заказ, указав адрес и предпочтения по времени доставки. Все детали заказа подтверждаются через выбранный вами канал связи.
Доставка алкоголя осуществляется в оговорённые сроки и в удобное для клиента время. Если сделать заказ утром, есть шанс получить напитки уже в течение нескольких часов. Обязательно проверьте доставленный продукт и сохранность упаковки перед оплатой.
Доставка алкоголя — это современное решение для любителей удобства и скорости. Благодаря разнообразию выбора любой сможет найти что-то по своему вкусу. Использование доставки делает приобретение спиртных напитков более комфортным и безопасным.
Лучшее решение для тех, кто ищет [url=https://proekty-domov7.ru]готовые проекты загородных домов[/url], — это широкий выбор качественных и эффективных решений.
Среди преимуществ таких проектов — минимизация ошибок и ускорение начала возведения жилища.
В случае аварийного вскрытия замков [url=https://zamok-key.ru/]вскрытие дверей спб срочно[/url], наши квалифицированные мастера быстро и без повреждений откроют любую дверь в Санкт-Петербурге.
Аварийное вскрытие замков — это важная услуга, которая часто требуется в экстренных ситуациях .
Главной задачей таких специалистов является быстрое и безопасное вскрытие замка без повреждений .
В процессе оценки ситуации мастер определяет наиболее эффективные методы для скорейшего открытия замка.
В арсенале специалистов есть широкий выбор профессиональных средств для обеспечения быстрого вскрытия.
Попытки открыть замок самостоятельно могут привести к его повреждению и дополнительным затратам .
В зависимости от типа замка выбирается метод вскрытия, чтобы минимизировать риск повреждения .
Профессиональные мастера всегда стремятся выполнить работу максимально быстро, чтобы минимизировать неудобства клиенту .
Такой вид работы требует профессионализма и современных оборудования .
役立ちます オンラインガイド! ますます素敵に! [url=https://iqvel.com/ja/a/%E3%83%A1%E3%82%AD%E3%82%B7%E3%82%B3/%E3%83%81%E3%83%81%E3%82%A7%E3%83%B3%E3%83%BB%E3%82%A4%E3%83%83%E3%83%84%E3%82%A1]天文観測[/url] バス+徒歩接続 — 一押し推薦 即座に参考。
https://t.me/Asiapsi
Как долго действует [url=https://prodvizhenie-sajta-s-garantiej.ru]продвижение сайта с гарантией[/url] — что происходит после окончания срока?